Numerical integration is a standard topic in first-semester calculus. From time to time, I have received questions from students on various aspects of this topic, including:
- Why is numerical integration necessary in the first place?
- Where do these formulas come from (especially Simpson’s Rule)?
- How can I do all of these formulas quickly?
- Is there a reason why the Midpoint Rule is better than the Trapezoid Rule?
- Is there a reason why both the Midpoint Rule and the Trapezoid Rule converge quadratically?
- Is there a reason why Simpson’s Rule converges like the fourth power of the number of subintervals?
In this series, I hope to answer these questions. While these are standard questions in a introductory college course in numerical analysis, and full and rigorous proofs can be found on Wikipedia and Mathworld, I will approach these questions from the point of view of a bright student who is currently enrolled in calculus and hasn’t yet taken real analysis or numerical analysis.

In the previous post in this series, I discussed three different ways of numerically approximating the definite integral 




In this series, we’ll choose equal-sized subintervals of the interval ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=000000&s=0&c=20201002)


![\int_a^b f(x) \, dx \approx h \left[f(x_0) + f(x_1) + \dots + f(x_{n-1}) \right] \equiv L_n](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28x_0%29+%2B+f%28x_1%29+%2B+%5Cdots+%2B+f%28x_%7Bn-1%7D%29+%5Cright%5D+%5Cequiv+L_n&bg=ffffff&fg=000000&s=0&c=20201002)
using left endpoints,
![\int_a^b f(x) \, dx \approx h \left[f(x_1) + f(x_2) + \dots + f(x_n) \right] \equiv R_n](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28x_1%29+%2B+f%28x_2%29+%2B+%5Cdots+%2B+f%28x_n%29+%5Cright%5D+%5Cequiv+R_n&bg=ffffff&fg=000000&s=0&c=20201002)
using right endpoints, and
![\int_a^b f(x) \, dx \approx h \left[f(c_1) + f(c_2) + \dots + f(c_n) \right] \equiv M_n](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28c_1%29+%2B+f%28c_2%29+%2B+%5Cdots+%2B+f%28c_n%29+%5Cright%5D+%5Cequiv+M_n&bg=ffffff&fg=000000&s=0&c=20201002)
using the midpoints of the subintervals.
All three of these approximations were obtained by approximating the above shaded region by rectangles. However, perhaps it might be better to use some other shape besides rectangles. In the Trapezoidal Rule, we approximate the area by using (surprise!) trapezoids, as in the figure below.
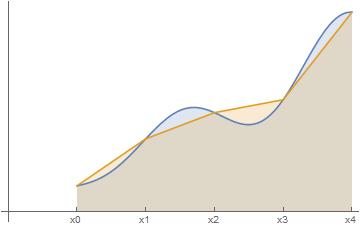
The first trapezoid has height 


![\frac{1}{2} h[ f(x_0) + f(x_1) ]](https://s0.wp.com/latex.php?latex=%5Cfrac%7B1%7D%7B2%7D+h%5B+f%28x_0%29+%2B+f%28x_1%29+%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![T_n = \displaystyle \frac{h}{2}[f(x_0) + f(x_1)] + \frac{h}{2} [f(x_1) + f(x_2)] + \dots +](https://s0.wp.com/latex.php?latex=T_n+%3D+%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D%5Bf%28x_0%29+%2B+f%28x_1%29%5D+%2B+%5Cfrac%7Bh%7D%7B2%7D+%5Bf%28x_1%29+%2B+f%28x_2%29%5D+%2B+%5Cdots+%2B+&bg=ffffff&fg=000000&s=0&c=20201002)
![+ \displaystyle \frac{h}{2} [f(x_{n-2})+f(x_{n-1})] + \frac{h}{2} [f(x_{n-1})+f(x_n)]](https://s0.wp.com/latex.php?latex=%2B+%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D+%5Bf%28x_%7Bn-2%7D%29%2Bf%28x_%7Bn-1%7D%29%5D+%2B+%5Cfrac%7Bh%7D%7B2%7D+%5Bf%28x_%7Bn-1%7D%29%2Bf%28x_n%29%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{h}{2} [f(x_0) + 2f(x_1) + 2f(x_2) + \dots + 2f(x_{n-2}) + 2f(x_{n-1}) + f(x_n)].](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D+%5Bf%28x_0%29+%2B+2f%28x_1%29+%2B+2f%28x_2%29+%2B+%5Cdots+%2B+2f%28x_%7Bn-2%7D%29+%2B+2f%28x_%7Bn-1%7D%29+%2B+f%28x_n%29%5D.&bg=ffffff&fg=000000&s=0&c=20201002)
Interestingly, 



![= \displaystyle \frac{h}{2} \left[f(x_0) + f(x_1) + f(x_2) + \dots + f(x_{n-1}) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D+%5Cleft%5Bf%28x_0%29+%2B+f%28x_1%29+%2B+f%28x_2%29+%2B+%5Cdots+%2B+f%28x_%7Bn-1%7D%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![+\displaystyle \frac{h}{2} \left[f(x_1) + f(x_2) + \dots + f(x_{n-1}) + f(x_{n}) \right]](https://s0.wp.com/latex.php?latex=%2B%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D+%5Cleft%5Bf%28x_1%29+%2B+f%28x_2%29+%2B+%5Cdots+%2B+f%28x_%7Bn-1%7D%29+%2B+f%28x_%7Bn%7D%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{h}{2} \left[f(x_0) + 2f(x_1) + \dots + 2f(x_{n-1}) + f(x_n) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7Bh%7D%7B2%7D+%5Cleft%5Bf%28x_0%29+%2B+2f%28x_1%29+%2B+%5Cdots+%2B+2f%28x_%7Bn-1%7D%29+%2B+f%28x_n%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)

Of course, as a matter of computation, it’s a lot quicker to directly compute
 , so that
, so that  ,
,  ,
,  ,
,  , and
, and  . We then can draw rectangles using the left endpoints of each subinterval. The sum of the areas of these rectangles below is
. We then can draw rectangles using the left endpoints of each subinterval. The sum of the areas of these rectangles below is ,
, subintervals and
subintervals and ![\int_a^b f(x) \, dx \approx h \left[f(x_0) + f(x_1) + \dots + f(x_{n-1}) \right]](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28x_0%29+%2B+f%28x_1%29+%2B+%5Cdots+%2B+f%28x_%7Bn-1%7D%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)

 ,
,![\int_a^b f(x) \, dx \approx h \left[f(x_1) + f(x_2) + \dots + f(x_n) \right]](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28x_1%29+%2B+f%28x_2%29+%2B+%5Cdots+%2B+f%28x_n%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)

 . The sum of the areas of the rectangles below is
. The sum of the areas of the rectangles below is ,
,![\int_a^b f(x) \, dx \approx h \left[f(c_1) + f(c_2) + \dots + f(c_n) \right]](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+f%28x%29+%5C%2C+dx+%5Capprox+h+%5Cleft%5Bf%28c_1%29+%2B+f%28c_2%29+%2B+%5Cdots+%2B+f%28c_n%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)

 , which is closely related to the area under the bell curve
, which is closely related to the area under the bell curve  . This integral cannot be computed using elementary functions. However, using integration by parts, there are some related integrals that can be computed:
. This integral cannot be computed using elementary functions. However, using integration by parts, there are some related integrals that can be computed:


 ,
, , a polynomial of degree
, a polynomial of degree ![\displaystyle \frac{d}{dx} \left[ f(x) e^{-x^2} \right] = e^{-x^2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7Bd%7D%7Bdx%7D+%5Cleft%5B+f%28x%29+e%5E%7B-x%5E2%7D+%5Cright%5D+%3D+e%5E%7B-x%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002)

 .
. is a polynomial of degree
is a polynomial of degree  while
while  is a polynomial of degree
is a polynomial of degree  . Therefore, the left hand side must have degree
. Therefore, the left hand side must have degree  , where the exponents
, where the exponents  may or may not be integers.
may or may not be integers.  . Indeed, although the proof goes well beyond first-year calculus, there is a theorem that says that if
. Indeed, although the proof goes well beyond first-year calculus, there is a theorem that says that if  can be expressed in terms of elementary functions, then the antiderivative must have the form
can be expressed in terms of elementary functions, then the antiderivative must have the form  . So the guess above actually can be rigorously justified. References:
. So the guess above actually can be rigorously justified. References: to find
to find  .
. to find
to find 

 , otherwise known as the bell curve. For most numbers
, otherwise known as the bell curve. For most numbers  and
and  , the area
, the area





![\displaystyle \int_0^{2R} e^{-sz} \exp \left[ -c \left( z \sqrt{4R^2-z^2} + 4R^2 \arcsin \frac{z}{2R} \right) \right] dz](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_0%5E%7B2R%7D+e%5E%7B-sz%7D+%5Cexp+%5Cleft%5B+-c+%5Cleft%28+z+%5Csqrt%7B4R%5E2-z%5E2%7D%C2%A0+%2B+4R%5E2+%5Carcsin+%5Cfrac%7Bz%7D%7B2R%7D+%5Cright%29+%5Cright%5D+dz&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \int_0^d \exp \left[ -sz - \lambda \left(z - \frac{z^2}{4d} \right) \right] dz](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_0%5Ed+%5Cexp+%5Cleft%5B+-sz+-+%5Clambda+%5Cleft%28z+-+%5Cfrac%7Bz%5E2%7D%7B4d%7D+%5Cright%29+%5Cright%5D+dz&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \int_d^{d \sqrt{2}} \exp \left[ -sz - \lambda \left( \frac{d (\pi+1)}{2} - d \arcsin \frac{d}{z} + \frac{z^2}{4d} - \sqrt{z^2-d^2} \right) \right] dz](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_d%5E%7Bd+%5Csqrt%7B2%7D%7D+%5Cexp+%5Cleft%5B+-sz+-+%5Clambda+%5Cleft%28+%5Cfrac%7Bd+%28%5Cpi%2B1%29%7D%7B2%7D+-+d+%5Carcsin+%5Cfrac%7Bd%7D%7Bz%7D+%2B+%5Cfrac%7Bz%5E2%7D%7B4d%7D+-+%5Csqrt%7Bz%5E2-d%5E2%7D+%5Cright%29+%5Cright%5D+dz&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \int_0^\infty \exp \left[-sz - \eta \left(1 - e^{-cz/2} - \frac{cz}{4} e^{-cz/2} \right) \right] dz](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_0%5E%5Cinfty+%5Cexp+%5Cleft%5B-sz+-+%5Ceta+%5Cleft%281+-+e%5E%7B-cz%2F2%7D+-+%5Cfrac%7Bcz%7D%7B4%7D+e%5E%7B-cz%2F2%7D+%5Cright%29+%5Cright%5D+dz&bg=ffffff&fg=000000&s=0&c=20201002)