At long last, we have reached the end of this series of posts.
The derivation is elementary; I’m confident that I could have understood this derivation had I seen it when I was in high school. That said, the word “elementary” in mathematics can be a bit loaded — this means that it is based on simple ideas that are perhaps used in a profound and surprising way. Perhaps my favorite quote along these lines was this understated gem from the book Three Pearls of Number Theory after the conclusion of a very complicated proof in Chapter 1:
You see how complicated an entirely elementary construction can sometimes be. And yet this is not an extreme case; in the next chapter you will encounter just as elementary a construction which is considerably more complicated.
Here are the elementary ideas from calculus, precalculus, and high school physics that were used in this series:
Physics
Conservation of angular momentum
Newton’s Second Law
Newton’s Law of Gravitation
Precalculus
Completing the square
Quadratic formula
Factoring polynomials
Complex roots of polynomials
Bounds on and
Period of and
Zeroes of and
Trigonometric identities (Pythagorean, sum and difference, double-angle)
Conic sections
Graphing in polar coordinates
Two-dimensional vectors
Dot products of two-dimensional vectors (especially perpendicular vectors)
Euler’s equation
Calculus
The Chain Rule
Derivatives of and
Linearizations of , , and near (or, more generally, their Taylor series approximations)
Derivative of
Solving initial-value problems
Integration by substitution
While these ideas from calculus are elementary, they were certainly used in clever and unusual ways throughout the derivation.
I should add that although the derivation was elementary, certain parts of the derivation could be made easier by appealing to standard concepts from differential equations.
One more thought. While this series of post was inspired by a calculation that appeared in an undergraduate physics textbook, I had thought that this series might be worthy of publication in a mathematical journal as an historical example of an important problem that can be solved by elementary tools. Unfortunately for me, Hieu D. Nguyen’s terrific article Rearing Its Ugly Head: The Cosmological Constant and Newton’s Greatest Blunder in The American Mathematical Monthly is already in the record.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
Under general relativity, the motion of a planet around the Sun —in polar coordinates , with the Sun at the origin — satisfies the initial-value problem
,
,
,
where , , , is the gravitational constant of the universe, is the mass of the planet, is the mass of the Sun, is the constant angular momentum of the planet, is the speed of light, and is the smallest distance of the planet from the Sun during its orbit (i.e., at perihelion).
We now take the perspective of a student who is taking a first-semester course in differential equations. There are two standard techniques for solving a second-order non-homogeneous differential equations with constant coefficients. One of these is the method of variation of parameters. First, we solve the associated homogeneous differential equation
.
The characteristic equation of this differential equation is , which clearly has the two imaginary roots . Therefore, two linearly independent solutions of the associated homogeneous equation are and .
(As an aside, this is one answer to the common question, “What are complex numbers good for?” The answer is naturally above the heads of Algebra II students when they first encounter the mysterious number , but complex numbers provide a way of solving the differential equations that model multiple problems in statics and dynamics.)
According to the method of variation of parameters, the general solution of the original nonhomogeneous differential equation
is
,
where
,
,
and is the Wronskian of and , defined by the determinant
.
Well, that’s a mouthful.
The only good news is that is easy to compute. Since and , we have
from the usual Pythagorean trigonometric identity. Therefore, the denominators in the integrals for and essentially disappear.
Unfortunately, computing and , using
,
is a beast, requiring the creative use of multiple trigonometric identities. We begin with , using the substitution :
,
where we use for the constant of integration instead of the usual . Second,
.
Unfortunately, this is not easily simplified with a substitution, so we have to expand the integrand:
,
using for the constant of integration. Therefore, by variation of parameters, the general solution of the nonhomogeneous differential equation is
,
where is another arbitrary constant.
Next, we use the initial conditions to find the constants and . From the initial condition , we obtain
,
so that
.
Next, we compute and use the initial condition :
.
Substituting these values for and , we finally arrive at the solution
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We previously showed that if the motion of a planet around the Sun is expressed in polar coordinates , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
,
where and is a certain constant. We will also impose the initial condition that the planet is at perihelion (i.e., is closest to the sun), at a distance of , when . This means that obtains its maximum value of when . This leads to the two initial conditions
;
the second equation arises since has a local extremum at .
We now take the perspective of a student who is taking a first-semester course in differential equations. There are two standard techniques for solving a second-order non-homogeneous differential equations with constant coefficients. One of these is the method of variation of parameters. First, we solve the associated homogeneous differential equation
.
The characteristic equation of this differential equation is , which clearly has the two imaginary roots . Therefore, two linearly independent solutions of the associated homogeneous equation are and .
(As an aside, this is one answer to the common question, “What are complex numbers good for?” The answer is naturally above the heads of Algebra II students when they first encounter the mysterious number , but complex numbers provide a way of solving the differential equations that model multiple problems in statics and dynamics.)
According to the method of variation of parameters, the general solution of the original nonhomogeneous differential equation
is
,
where
,
,
and is the Wronskian of and , defined by the determinant
.
Well, that’s a mouthful.
Fortunately, for the example at hand, these computations are pretty easy. First, since and , we have
from the usual Pythagorean trigonometric identity. Therefore, the denominators in the integrals for and essentially disappear.
Since , the integrals for and are straightforward to compute:
,
where we use for the constant of integration instead of the usual . Second,
,
using for the constant of integration. Therefore, by variation of parameters, the general solution of the nonhomogeneous differential equation is
.
Unsurprisingly, this matches the answer in the previous post that was found by the method of undetermined coefficients.
For the sake of completeness, I repeat the argument used in the previous two posts to determine and . This is require using the initial conditions and . From the first initial condition,
From the second initial condition,
.
From these two constants, we obtain
,
where .
Finally, since , we see that the planet’s orbit satisfies
,
so that, as shown earlier in this series, the orbit is an ellipse with eccentricity .
In my capstone class for future secondary math teachers, I ask my students to come up with ideas for engaging their students with different topics in the secondary mathematics curriculum. In other words, the point of the assignment was not to devise a full-blown lesson plan on this topic. Instead, I asked my students to think about three different ways of getting their students interested in the topic in the first place.
I plan to share some of the best of these ideas on this blog (after asking my students’ permission, of course).
This student submission comes from my former student Morgan Mayfield. His topic, from Precalculus: deriving the double angle formulas for sine, cosine, and tangent.
How could you as a teacher create an activity or project that involves your topic?
I want to provide some variety for opportunities to make this an engaging opportunity for Precalculus students and some Calculus students. Here are my three thoughts:
IDEA 1:
For precalculus students in a regular or advanced class, have them derive this formula in groups. After students are familiar with the Pythagorean identities and with angle sum identities, group students and ask them to derive a formula for double angles Sin(2θ), Cos(2θ), Tan(2θ). Let them struggle a bit, and if needed give them some hints such as useful formulas and ways to represent multiplication so that it looks like other operations. From here, encourage students to simplify when they can and challenge students to find the other formulas of Cos(2θ). Ask students to speculate instances when each formula for Cos(2θ) would be advantageous. This gives students confidence in their own abilities and show how math is interconnected and not just a bunch of trivial formulas.
Lastly, to challenge students, have them come up with an alternative way to prove Tan(2θ), notably Sin(2θ)/Cos(2θ). This would make an appropriate activity for students while having them continue practicing proving trigonometric identities.
IDEA 2:
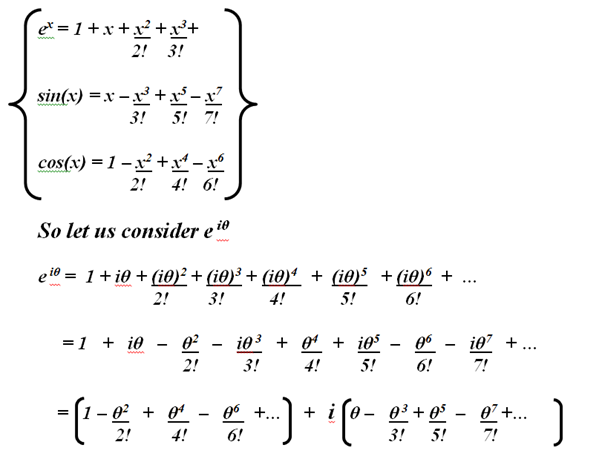
This next idea should be implemented for an advanced Precal class, and only when there is some time to spare. Euler was an intelligent man and left us with the Euler’s Formula: . Have Precalculus students suspend their questions about where it comes from and what it is used for. This is not something they would use in their class. Reassure them that for what they will do, all they need to understand is imaginary numbers, multiplying imaginary numbers, and laws of exponents. Have them plug in x = A + B and simplify the right-hand side of the equation so that we get: where and are two real numbers. The goal here is to get . All the steps to get to this point is Algebra, nothing out of their grasp. Now, the next part is to really get their brains going about what meaning we can make of this. If they are struggling, have them think about the implications of two imaginary numbers being equal; the coefficient of the real parts and imaginary parts must be equal to each other. Lastly, ask them if these equations seem familiar, where are they from, and what are they called…the angle sum formulas. From here, this can lead into what if x=2A? Students will either brute force the formula again, and others will realize x = A + A and plug it in to the equation they just derived and simplify. This idea is a 2-in-1 steal for the angle sum formulas and double angle formulas. It’s biggest downside is this is for Sin(2θ) and Cos(2θ).IDEA 3:
Take IDEA 2, and put it in a Calculus 2 class. Everything that the precalculus class remains, but now have the paired students prove the Euler’s Formula using Taylor Series. Guide them through using the Taylor Series to figure out a Taylor Series representation of , , and . Then ask students to find an expanded Taylor Series of to 12 terms with ellipses, no need to evaluate each term, just the precise term. Give hints such as and to consider and other similar cases. Lastly, ask students to separate the extended series in a way that mimics using ellipses to shows the series goes to infinity. What they should find is something like this:
Look familiar? Well it is the addition of two Taylor Series that represent Sin(x) and Cos(x). This is the last connection students need to make. Give hints to look through their notes to see why the “a” and “b” in the imaginary number look so familiar. This, is just one way to prove Euler’s Formula, then you can continue with IDEA 2 until your students prove the angle sum formulas and double angle formulas.
How does this topic extend what your students should have learned in previous courses?
Students in Texas will typically be exposed to the Pythagorean Theorem in 8th grade. At this stage, students use to find a missing side length. Students may also be exposed to Pythagorean triples at this stage. Then at the Geometry level or in a Trigonometry section, students will be exposed to the Pythagorean Identity. The Identity is . I think that this is not fair for students to just learn this identity without connecting it to the Pythagorean Theorem. I think it would be a nice challenge student to solve for this identity by using a right triangle with hypotenuse c so that Sin (θ) = b/c and cos (θ) = a/c, one could then show either and thus or one could show (using the Pythagorean theorem).
From here, students learn about the angle addition and subtraction formulas in Precalculus. This is all that they need to derive the double angle formulas.
This would be a good challenge exercise for students to do in pairs. Sin(2θ) = Sin(θ + θ), Cos(2 θ) = Cos(θ + θ), Tan(2θ) = Tan(θ + θ). Now we can apply the angle sum formula where both angles are equal:
Sin(2θ) = sin(θ)cos(θ) + cos(θ)sin(θ) = 2sin(θ)cos(θ)
Cos(2θ) = cos(θ)cos(θ) – sin(θ)sin(θ) = (We use a Pythagorean Identity here)
Tan(2θ) =
Bonus challenge, use Sin(2θ) and Cos(2θ) to get Tan(2θ). Well, if , then
The derivations are straight forward, and I believe that many students get off the hook by not being exposed to deriving many trigonometric identities and taking them as facts. This is in the grasp of an average 10th to 12th grader.
What are the contributions of various cultures to this topic?
I have included four links that talk about the history of Trigonometry. It seemed that ancient societies would need to know about the Pythagorean Identities and the angles sum formulas to know the double angle formulas. Here is our problem, it’s hard to know who “did it first?” and when “did they know it?”. Mathematical proofs and history were not kept as neatly written record but as oral traditions, entertainment, hobbies, and professions. The truth is that from my reading, many cultures understood the double angle formula to some extent independently of each other, even if there was no formal proof or record of it. Looking back at my answer to B2, it seems that the double angle formula is almost like a corollary to knowing the angle sum formulas, and thus to understand one could imply knowledge of the other. Perhaps, it was just not deemed important to put the double angle formula into a category of its own. Many of the people who figured out these identities were doing it because they were astronomers, navigators, or carpenters (construction). Triangles and circles are very important to these professions. Knowledge of the angle sum formula was known in Ancient China, Ancient India, Egypt, Greece (originally in the form of broken chords theorem by Archimedes), and the wider “Medieval Islamic World”. Do note that that Egypt, Greece, and the Medieval Islamic World were heavily intertwined as being on the east side of the Mediterranean and being important centers of knowledge (i.e. Library of Alexandria.) Here is the thing, their knowledge was not always demonstrated in the same way as we know it today. Some cultures did have functions similar to the modern trigonometric functions today, and an Indian mathematician, Mādhava of Sangamagrāma, figured out the Taylor Series approximations of those functions in the 1400’s. Greece and China for example relayed heavily on displaying knowledge of trigonometry in ideas of the length of lines (rods) as manifestations of variables and numbers. Ancient peoples didn’t have calculators, and they may have defined trigonometric functions in a way that would be correct such as the “law of sines” or a “Taylor series”, but still relied on physical “sine tables” to find a numerical representation of sine to n numbers after the decimal point. How we think of Geometry and Trigonometry today may have come from Descartes’ invention of the Cartesian plane as a convenient way to bridge Algebra and Geometry.
References:
https://www.mathpages.com/home/kmath205/kmath205.htmhttps://en.wikipedia.org/wiki/History_of_trigonometryhttps://www.ima.umn.edu/press-room/mumford-and-pythagoras-theorem
I used these shirts as props when teaching Precalculus this week, and they worked like a charm.
After deriving the three Pythagorean identities from trigonometry, I told my class that I got these hand-made his-and-hers T-shirts for my wife’s birthday a couple of years ago. If you can’t see from the picture, one says and the other .
After holding up the shirts, I then asked the class what mathematical message was being communicated.
After a few seconds, someone ventured a guess: “We add up to 1?”
I answered, “That’s right. Together, we’re one.”
Whereupon the class spontaneously reacted with a loud “Awwwwwwwwww.”
In my capstone class for future secondary math teachers, I ask my students to come up with ideas for engaging their students with different topics in the secondary mathematics curriculum. In other words, the point of the assignment was not to devise a full-blown lesson plan on this topic. Instead, I asked my students to think about three different ways of getting their students interested in the topic in the first place.
I plan to share some of the best of these ideas on this blog (after asking my students’ permission, of course).
This student submission comes from my former student Daniel Adkins. His topic, from Precalculus: deriving the double angle formulas for sine, cosine, and tangent.
How does this topic extend what your students should have already learned?
A major factor that simplifies deriving the double angle formulas is recalling the trigonometric identities that help students “skip steps.” This is true especially for the Sum formulas, so a brief review of these formulas in any fashion would help students possibly derive the equations on their own in some cases. Listed below are the formulas that can lead directly to the double angle formulas.
A list of the formulas that students can benefit from recalling:
Sum Formulas:
sin(a+b) = sin(a)cos(b) + cos(a)sin(b)
cos(a+b) = cos(a)cos(b) – sin(a)sin(b)
tan(a+b) = [tan(a) +tan(b)] / [1-tan(a)tan(b)]
Pythagorean Identity:
Sin2 (a) + Cos2(a) = 1
This leads to the next topic, an activity for students to attempt the equation on their own.
How could you as a teacher create an activity or project that involves your topic?
I’m a firm believer that the more often a student can learn something of their own accord, the better off they are. Providing the skeletal structure of the proofs for the double angle formulas of sine, cosine, and tangent might be enough to help students reach the formulas themselves. The major benefit of this is that, even though these are simple proofs, they have a lot of variance on how they may be presented to students and how “hands on” the activity can be.
I have an example worksheet demonstrating this with the first two double angle formulas attached below. This is in extremely hands on format that can be given to students with the formulas needed in the top right corner and the general position where these should be inserted. If needed the instructor could take this a step further and have the different Pythagorean Identities already listed out (I.e. Cos2(a) = 1 – Sin2(a), Sin2(a) = 1 – Cos2(a)) to emphasize that different formats could be needed. This is an extreme that wouldn’t take students any time to reach the conclusions desired. Of course a lot of this information could be dropped to increase the effort needed to reach the conclusion.
A major benefit with this also is that even though they’re simple, students will still feel extremely rewarded from succeeding on this paper on their own, and thus would be more intrinsically motivated towards learning trig identities.
How can Technology be used to effectively engage students with this topic?
When it comes to technology in the classroom, I tend to lean more on the careful side. I know me as a person/instructor, and I know I can get carried away and make a mess of things because there was so much excitement over a new toy to play with. I also know that the technology can often detract from the actual math itself, but when it comes to trigonometry, and basically any form of geometric mathematics, it’s absolutely necessary to have a visual aid, and this is where technology excels.
The Wolfram Company has provided hundreds of widgets for this exact purpose, and below, you’ll find one attached that demonstrates that sin(2a) appears to be equal to its identity 2cos(a)sin(a). This is clearly not a rigorous proof, but it will help students visualize how these formulas interact with each other and how they may be similar. The fact that it isn’t rigorous may even convince students to try to debunk it. If you can make a student just irritated enough that they spend a few minutes trying to find a way to show you that you’re wrong, then you’ve done your job in that you’ve convinced them to try mathematics for a purpose.
After all, at the end of the day, it doesn’t matter how you begin your classroom, or how you engage your students, what matters is that they are engaged, and are willing to learn.
I’m doing something that I should have done a long time ago: collecting a series of posts into one single post. The following links comprised my series on different ways of computing the limit
I’m doing something that I should have done a long time ago: collecting a series of posts into one single post. The following links comprised my series on different ways of solving the contest problem “If , what is ?”
One of my colleagues placed the following problem on an exam for his Calculus II course…
and was impressed by the variety of correct responses that he received. I thought it would be fun to discuss some of the different ways that this limit can be computed.
Method #3. A trigonometric identity. When we see inside of an integral, one kneejerk reaction is to try the trigonometric substitution . So let’s use this here. Also, since , we can change the limit to be :
The following problem appeared on the American High School Mathematics Examination (now called the AMC 12) in 1988:
If , what is ?
When I presented this problem to a group of students, I was pleasantly surprised by the amount of creativity shown when solving this problem.
Yesterday, I presented a solution using a Pythagorean identity, but I was unable to be certain if the final answer was a positive or negative without drawing a picture. Here’s a third solution that also use a Pythagorean trig identity but avoids this difficulty. Again, I begin by squaring both sides.
Yesterday, I used the Pythagorean identity again to find . Today, I’ll instead plug back into the original equation :
Unlike the example yesterday, the signs of and must agree. That is, if , then must also be positive. On the other hand, if , then must also be negative.
If they’re both positive, then
,
and if they’re both negative, then
.
Either way, the answer must be .
This is definitely superior to the solution provided in yesterday’s post, as there’s absolutely no doubt that the product must be positive.
and
,
, and
near
(or, more generally, their Taylor series approximations)
substitution


 , with the Sun at the origin — satisfies the initial-value problem
, with the Sun at the origin — satisfies the initial-value problem  ,
, ,
, ,
, ,
,  ,
,  ,
,  is the gravitational constant of the universe,
is the gravitational constant of the universe,  is the mass of the planet,
is the mass of the planet,  is the mass of the Sun,
is the mass of the Sun,  is the constant angular momentum of the planet,
is the constant angular momentum of the planet,  is the speed of light, and
is the speed of light, and  is the smallest distance of the planet from the Sun during its orbit (i.e., at perihelion).
is the smallest distance of the planet from the Sun during its orbit (i.e., at perihelion). 
 .
. , which clearly has the two imaginary roots
, which clearly has the two imaginary roots  . Therefore, two linearly independent solutions of the associated homogeneous equation are
. Therefore, two linearly independent solutions of the associated homogeneous equation are  and
and  .
. , but complex numbers provide a way of solving the differential equations that model multiple problems in statics and dynamics.)
, but complex numbers provide a way of solving the differential equations that model multiple problems in statics and dynamics.)
 ,
, ,
, ,
, is the Wronskian of
is the Wronskian of  and
and  , defined by the determinant
, defined by the determinant .
. is easy to compute. Since
is easy to compute. Since 
 and
and  essentially disappear.
essentially disappear. ,
,  :
:![f_1(\theta) = -\displaystyle \int \left[ \frac{1}{\alpha} + \delta \left( \frac{1 + \epsilon \cos \theta}{\alpha} \right)^2 \right] \sin \theta \, d\theta](https://s0.wp.com/latex.php?latex=f_1%28%5Ctheta%29+%3D+-%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B1%7D%7B%5Calpha%7D+%2B+%5Cdelta+%5Cleft%28+%5Cfrac%7B1+%2B+%5Cepsilon+%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%5Cright%29%5E2+%5Cright%5D+%5Csin+%5Ctheta+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \int \left[ \frac{1}{\alpha} + \delta \left( \frac{1 + \epsilon t}{\alpha} \right)^2 \right] \, dt](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B1%7D%7B%5Calpha%7D+%2B+%5Cdelta+%5Cleft%28+%5Cfrac%7B1+%2B+%5Cepsilon+t%7D%7B%5Calpha%7D+%5Cright%29%5E2+%5Cright%5D+%5C%2C+dt&bg=ffffff&fg=000000&s=0&c=20201002)

 ,
, for the constant of integration instead of the usual
for the constant of integration instead of the usual  . Second,
. Second,![f_2(\theta) = \displaystyle \int \left[ \frac{1}{\alpha} + \delta \left( \frac{1 + \epsilon \cos \theta}{\alpha} \right)^2 \right] \cos\theta \, d\theta](https://s0.wp.com/latex.php?latex=f_2%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B1%7D%7B%5Calpha%7D+%2B+%5Cdelta+%5Cleft%28+%5Cfrac%7B1+%2B+%5Cepsilon+%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%5Cright%29%5E2+%5Cright%5D+%5Ccos%5Ctheta+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) .
.![f_2(\theta) = \displaystyle \int \left[ \frac{\cos \theta}{\alpha} + \frac{\delta \cos \theta}{\alpha^2} + \frac{2 \delta \epsilon \cos^2 \theta}{\alpha^2} + \frac{\delta \epsilon^2 \cos^3 \theta}{\alpha^2} \right] \, d\theta](https://s0.wp.com/latex.php?latex=f_2%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%2B+%5Cfrac%7B%5Cdelta+%5Ccos+%5Ctheta%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B2+%5Cdelta+%5Cepsilon+%5Ccos%5E2+%5Ctheta%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon%5E2+%5Ccos%5E3+%5Ctheta%7D%7B%5Calpha%5E2%7D+%5Cright%5D+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \int \left[ \frac{\cos \theta}{\alpha} + \frac{\delta \cos \theta}{\alpha^2} + \frac{\delta \epsilon (1 + \cos 2 \theta)}{\alpha^2} + \frac{\delta \epsilon^2 \cos \theta \cos^2 \theta}{\alpha^2} \right] \, d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%2B+%5Cfrac%7B%5Cdelta+%5Ccos+%5Ctheta%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon+%281+%2B+%5Ccos+2+%5Ctheta%29%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon%5E2+%5Ccos+%5Ctheta+%5Ccos%5E2+%5Ctheta%7D%7B%5Calpha%5E2%7D+%5Cright%5D+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \int \left[ \frac{\cos \theta}{\alpha} + \frac{\delta \cos \theta}{\alpha^2} + \frac{\delta \epsilon}{\alpha^2} + \frac{\delta \epsilon \cos 2 \theta}{\alpha^2}+ \frac{\delta \epsilon^2 \cos \theta (1- \sin^2 \theta)}{\alpha^2} \right] \, d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%2B+%5Cfrac%7B%5Cdelta+%5Ccos+%5Ctheta%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon+%5Ccos+2+%5Ctheta%7D%7B%5Calpha%5E2%7D%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon%5E2+%5Ccos+%5Ctheta+%281-+%5Csin%5E2+%5Ctheta%29%7D%7B%5Calpha%5E2%7D+%5Cright%5D+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \int \left[ \frac{\cos \theta}{\alpha} + \frac{\delta (1 + \epsilon^2) \cos \theta}{\alpha^2} + \frac{\delta \epsilon}{\alpha^2} + \frac{\delta \epsilon \cos 2 \theta}{\alpha^2} - \frac{\delta \epsilon^2 \cos \theta \sin^2 \theta}{\alpha^2} \right] \, d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cint+%5Cleft%5B+%5Cfrac%7B%5Ccos+%5Ctheta%7D%7B%5Calpha%7D+%2B+%5Cfrac%7B%5Cdelta+%281+%2B+%5Cepsilon%5E2%29+%5Ccos+%5Ctheta%7D%7B%5Calpha%5E2%7D++%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon%7D%7B%5Calpha%5E2%7D+%2B+%5Cfrac%7B%5Cdelta+%5Cepsilon+%5Ccos+2+%5Ctheta%7D%7B%5Calpha%5E2%7D+-+%5Cfrac%7B%5Cdelta+%5Cepsilon%5E2+%5Ccos+%5Ctheta+%5Csin%5E2+%5Ctheta%7D%7B%5Calpha%5E2%7D+%5Cright%5D+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
 ,
, for the constant of integration. Therefore, by variation of parameters, the general solution of the nonhomogeneous differential equation is
for the constant of integration. Therefore, by variation of parameters, the general solution of the nonhomogeneous differential equation is















 ,
, is another arbitrary constant.
is another arbitrary constant. . From the initial condition
. From the initial condition  , we obtain
, we obtain

 ,
, .
. and use the initial condition
and use the initial condition 

 .
.
 .
. , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
, with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation  ,
, and
and  is a certain constant. We will also impose the initial condition that the planet is at perihelion (i.e., is closest to the sun), at a distance of
is a certain constant. We will also impose the initial condition that the planet is at perihelion (i.e., is closest to the sun), at a distance of  . This means that
. This means that  obtains its maximum value of
obtains its maximum value of  when
when  ;
; , the integrals for
, the integrals for  ,
, ,
,

 .
. and
and 






 ,
, .
. , we see that the planet’s orbit satisfies
, we see that the planet’s orbit satisfies ,
, .
. . Have Precalculus students suspend their questions about where it comes from and what it is used for. This is not something they would use in their class. Reassure them that for what they will do, all they need to understand is imaginary numbers, multiplying imaginary numbers, and laws of exponents. Have them plug in x = A + B and simplify the right-hand side of the equation so that we get:
. Have Precalculus students suspend their questions about where it comes from and what it is used for. This is not something they would use in their class. Reassure them that for what they will do, all they need to understand is imaginary numbers, multiplying imaginary numbers, and laws of exponents. Have them plug in x = A + B and simplify the right-hand side of the equation so that we get:  where
where  . All the steps to get to this point is Algebra, nothing out of their grasp. Now, the next part is to really get their brains going about what meaning we can make of this. If they are struggling, have them think about the implications of two imaginary numbers being equal; the coefficient of the real parts and imaginary parts must be equal to each other. Lastly, ask them if these equations seem familiar, where are they from, and what are they called…the angle sum formulas. From here, this can lead into what if x=2A? Students will either brute force the formula again, and others will realize x = A + A and plug it in to the equation they just derived and simplify. This idea is a 2-in-1 steal for the angle sum formulas and double angle formulas. It’s biggest downside is this is for Sin(2θ) and Cos(2θ).
IDEA 3:
Take IDEA 2, and put it in a Calculus 2 class. Everything that the precalculus class remains, but now have the paired students prove the Euler’s Formula using Taylor Series. Guide them through using the Taylor Series to figure out a Taylor Series representation of
. All the steps to get to this point is Algebra, nothing out of their grasp. Now, the next part is to really get their brains going about what meaning we can make of this. If they are struggling, have them think about the implications of two imaginary numbers being equal; the coefficient of the real parts and imaginary parts must be equal to each other. Lastly, ask them if these equations seem familiar, where are they from, and what are they called…the angle sum formulas. From here, this can lead into what if x=2A? Students will either brute force the formula again, and others will realize x = A + A and plug it in to the equation they just derived and simplify. This idea is a 2-in-1 steal for the angle sum formulas and double angle formulas. It’s biggest downside is this is for Sin(2θ) and Cos(2θ).
IDEA 3:
Take IDEA 2, and put it in a Calculus 2 class. Everything that the precalculus class remains, but now have the paired students prove the Euler’s Formula using Taylor Series. Guide them through using the Taylor Series to figure out a Taylor Series representation of  , and
, and  . Then ask students to find an expanded Taylor Series of to 12 terms with ellipses, no need to evaluate each term, just the precise term. Give hints such as
. Then ask students to find an expanded Taylor Series of to 12 terms with ellipses, no need to evaluate each term, just the precise term. Give hints such as  and to consider
and to consider  and other similar cases. Lastly, ask students to separate the extended series in a way that mimics
and other similar cases. Lastly, ask students to separate the extended series in a way that mimics  using ellipses to shows the series goes to infinity. What they should find is something like this:
using ellipses to shows the series goes to infinity. What they should find is something like this:
 to find a missing side length. Students may also be exposed to Pythagorean triples at this stage. Then at the Geometry level or in a Trigonometry section, students will be exposed to the Pythagorean Identity. The Identity is
to find a missing side length. Students may also be exposed to Pythagorean triples at this stage. Then at the Geometry level or in a Trigonometry section, students will be exposed to the Pythagorean Identity. The Identity is  . I think that this is not fair for students to just learn this identity without connecting it to the Pythagorean Theorem. I think it would be a nice challenge student to solve for this identity by using a right triangle with hypotenuse c so that Sin (θ) = b/c and cos (θ) = a/c, one could then show either
. I think that this is not fair for students to just learn this identity without connecting it to the Pythagorean Theorem. I think it would be a nice challenge student to solve for this identity by using a right triangle with hypotenuse c so that Sin (θ) = b/c and cos (θ) = a/c, one could then show either  and thus
and thus  or one could show
or one could show  (using the Pythagorean theorem).
From here, students learn about the angle addition and subtraction formulas in Precalculus. This is all that they need to derive the double angle formulas.
(using the Pythagorean theorem).
From here, students learn about the angle addition and subtraction formulas in Precalculus. This is all that they need to derive the double angle formulas.






 Bonus challenge, use Sin(2θ) and Cos(2θ) to get Tan(2θ). Well, if
Bonus challenge, use Sin(2θ) and Cos(2θ) to get Tan(2θ). Well, if  , then
, then



 and the other
and the other  .
.
 , what is
, what is  ?”
?”
 inside of an integral, one kneejerk reaction is to try the trigonometric substitution
inside of an integral, one kneejerk reaction is to try the trigonometric substitution  . So let’s use this here. Also, since
. So let’s use this here. Also, since  , we can change the limit to be
, we can change the limit to be  :
:




 .
.






 , then
, then  must also be positive. On the other hand, if
must also be positive. On the other hand, if  , then
, then  must also be negative.
must also be negative. ,
, .
. .
.