In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We have shown that the motion of a planet around the Sun, expressed in polar coordinates 



where 









In this post, we will use the guesses

that arose from the technique/trick of reduction of order, where 

To do this, we will need to use the Product Rule for higher-order derivatives that was derived in the previous post:

and

In these formulas, Pascal’s triangle makes a somewhat surprising appearance; indeed, this pattern can be proven with mathematical induction.
We begin with 





Substituting into the fourth-order differential equation, we find the differential equation becomes




The important observation is that the terms containing 




Integrating twice, we can find



Therefore, a solution of the original differential equation will be

We now repeat the logic for 




Once again, a solution of this new differential equation will be 


Adding these provides the general solution of the differential equation:

Except for the order of the constants, this matches the solution that was presented earlier by using techniques taught in a proper course in differential equations.
 .
. ,
, .
. , which corresponds to the second-order differential equation
, which corresponds to the second-order differential equation  . We’ve already seen that
. We’ve already seen that  and
and  are solutions of this differential equation; perhaps they might also be solutions of the more complicated differential equation also? The answer, of course, is yes:
are solutions of this differential equation; perhaps they might also be solutions of the more complicated differential equation also? The answer, of course, is yes:
 .
. ,
, .
. :
:![(fg)'' = ( [fg]')' = (f'g)' + (fg')'](https://s0.wp.com/latex.php?latex=%28fg%29%27%27+%3D+%28+%5Bfg%5D%27%29%27+%3D+%28f%27g%29%27+%2B+%28fg%27%29%27&bg=ffffff&fg=000000&s=0&c=20201002)

 .
. :
:![(fg)''' = ( [fg]'')' = (f''g)' + 2(f'g')' + (fg'')'](https://s0.wp.com/latex.php?latex=%28fg%29%27%27%27+%3D+%28+%5Bfg%5D%27%27%29%27+%3D+%28f%27%27g%29%27+%2B+2%28f%27g%27%29%27+%2B++%28fg%27%27%29%27&bg=ffffff&fg=000000&s=0&c=20201002)

 .
.![(fg)^{(4)} = ( [fg]''')' = (f'''g)' + 3(f''g')' +3(f'g'')' + (fg''')'](https://s0.wp.com/latex.php?latex=%28fg%29%5E%7B%284%29%7D+%3D+%28+%5Bfg%5D%27%27%27%29%27+%3D+%28f%27%27%27g%29%27+%2B+3%28f%27%27g%27%29%27+%2B3%28f%27g%27%27%29%27+%2B+%28fg%27%27%27%29%27&bg=ffffff&fg=000000&s=0&c=20201002)

 .
. .
. .
. . Then
. Then  satisfies the new differential equation
satisfies the new differential equation  . Since
. Since  , we may substitute:
, we may substitute:

 . Therefore,
. Therefore,  and
and  are both double roots of this quartic equation. Therefore, the general solution for
are both double roots of this quartic equation. Therefore, the general solution for  is
is .
. and
and  :
:


 and
and  . Therefore,
. Therefore,
 , we find that
, we find that
 term is what predicts the precession of a planet’s orbit under general relativity.
term is what predicts the precession of a planet’s orbit under general relativity. ,
,


 .
. . Since
. Since  . Since
. Since  , we can substitute:
, we can substitute:

 . Factoring, we obtain
. Factoring, we obtain  , so that the three roots are
, so that the three roots are  and
and  . Therefore, the general solution of this differential equation is
. Therefore, the general solution of this differential equation is .
. and
and  are determined by the initial conditions. To find
are determined by the initial conditions. To find 
 .
. .
.
 .
. .
. using the quadratic formula; more on that later.) To apply the method of successive approximation, we will rewrite this so that
using the quadratic formula; more on that later.) To apply the method of successive approximation, we will rewrite this so that  , or
, or .
. .
. .
. .
. . Then
. Then






 into a calculator, then entering
into a calculator, then entering  , and then repeatedly hitting the
, and then repeatedly hitting the  button.
button. .
. .
. . Unfortunately, if we start with a guess near this root, like
. Unfortunately, if we start with a guess near this root, like  , the sequence unexpectedly diverges from
, the sequence unexpectedly diverges from  but eventually converges to the positive root
but eventually converges to the positive root  :
:
















 .
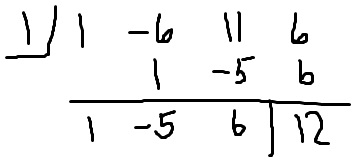
. (the constant term), while the denominator must be a factor of
(the constant term), while the denominator must be a factor of  (the leading coefficient). So, using the rational root test, we conclude
(the leading coefficient). So, using the rational root test, we conclude
 .
. and a constant
and a constant  so that
so that  .
.
 or
or  , I’ll tell my students:
, I’ll tell my students: