We now turn to a little-taught and perhaps controversial inverse function: arcsecant. As we’ve seen throughout this series, the domain of this inverse function must be chosen so that the graph of  satisfies the horizontal line test. It turns out that the choice of domain has surprising consequences that are almost unforeseeable using only the tools of Precalculus.
satisfies the horizontal line test. It turns out that the choice of domain has surprising consequences that are almost unforeseeable using only the tools of Precalculus.
The standard definition of  uses the interval
uses the interval ![[0,\pi]](https://s0.wp.com/latex.php?latex=%5B0%2C%5Cpi%5D&bg=ffffff&fg=000000&s=0&c=20201002) — or, more precisely,
— or, more precisely, ![[0,\pi/2) \cup (\pi/2, \pi]](https://s0.wp.com/latex.php?latex=%5B0%2C%5Cpi%2F2%29+%5Ccup+%28%5Cpi%2F2%2C+%5Cpi%5D&bg=ffffff&fg=000000&s=0&c=20201002) to avoid the vertical asymptote at
to avoid the vertical asymptote at  — in order to approximately match the range of
— in order to approximately match the range of  . However, when I was a student, I distinctly remember that my textbook chose
. However, when I was a student, I distinctly remember that my textbook chose  as the range for
as the range for  .
.
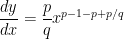
I believe that this definition has fallen out of favor today. However, for the purpose of today’s post, let’s just run with this definition and see what happens. This portion of the graph of is perhaps unorthodox, but it satisfies the horizontal line test so that the inverse function can be defined.

Let’s fast-forward a couple of semesters and use implicit differentiation (see also https://meangreenmath.com/2014/08/08/different-definitions-of-logarithm-part-8/ for how this same logic is used for other inverse functions) to find the derivative of :




At this point, the object is to convert the left-hand side to something involving only  . Clearly, we can replace
. Clearly, we can replace  with . As it turns out, the replacement of
with . As it turns out, the replacement of  is a lot simpler than we saw in yesterday’s post. Once again, we begin with one of the Pythagorean identities:
is a lot simpler than we saw in yesterday’s post. Once again, we begin with one of the Pythagorean identities:




So which is it, the positive answer or the negative answer? In yesterday’s post, the answer depended on whether was positive or negative. However, with the current definition of , we know for certain that the answer is the positive one! How can we be certain? The angle  must lie in either the interval
must lie in either the interval  or else the interval
or else the interval  . In either interval, is positive. So, using this definition of , we can simply say that
. In either interval, is positive. So, using this definition of , we can simply say that
 ,
,
and we don’t have to worry about  that appeared in yesterday’s post.
that appeared in yesterday’s post.

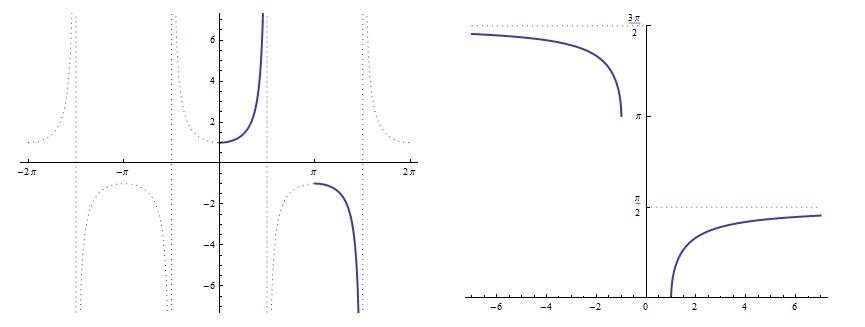
 Turning to integration, we now have the simple formula
Turning to integration, we now have the simple formula

that works whether is positive or negative. For example, the orange area can now be calculated correctly:



So, unlike yesterday’s post, this definition of produces a simple integration formula.
So why isn’t this the standard definition for ? I’m afraid the answer is simple: with this definition, the equation

is no longer correct if  . Indeed, I distinctly remember thinking, back when I was a student taking trigonometry, that the definition of seemed really odd, and it seemed to me that it would be better if it matched that of . Of course, at that time in my mathematical development, it would have been almost hopeless to explain that the range had been chosen to simplify certain integrals from calculus.
. Indeed, I distinctly remember thinking, back when I was a student taking trigonometry, that the definition of seemed really odd, and it seemed to me that it would be better if it matched that of . Of course, at that time in my mathematical development, it would have been almost hopeless to explain that the range had been chosen to simplify certain integrals from calculus.
So I suppose that The Powers That Be have decided that it’s more important for this identity to hold than to have a simple integration formula for 


 and performed a substitution. However, as I’ve discussed in this series, there are four different ways that this integral can be evaluated.
and performed a substitution. However, as I’ve discussed in this series, there are four different ways that this integral can be evaluated.
 is independent of
is independent of  , I can substitute any convenient value of
, I can substitute any convenient value of  yields the following simplification:
yields the following simplification:




![= 2\pi i \left[\displaystyle \frac{r_1}{r_1^2-1} + \displaystyle \frac{r_2}{r_2^2-1} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+i+%5Cleft%5B%5Cdisplaystyle+%5Cfrac%7Br_1%7D%7Br_1%5E2-1%7D+%2B+%5Cdisplaystyle+%5Cfrac%7Br_2%7D%7Br_2%5E2-1%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002) ,
, . In the above derivation,
. In the above derivation,  is the contour in the complex plane shown below (graphic courtesy of Mathworld).
is the contour in the complex plane shown below (graphic courtesy of Mathworld).


![\displaystyle \frac{r_1}{r_1^2-1} = \displaystyle \frac{\sqrt{1-b^2} + |b|i}{[\sqrt{1-b^2} + |b|i]^2 - 1}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7Br_1%7D%7Br_1%5E2-1%7D+%3D+%5Cdisplaystyle+%5Cfrac%7B%5Csqrt%7B1-b%5E2%7D+%2B+%7Cb%7Ci%7D%7B%5B%5Csqrt%7B1-b%5E2%7D+%2B+%7Cb%7Ci%5D%5E2+-+1%7D&bg=ffffff&fg=000000&s=0&c=20201002)


 .
.![\displaystyle \frac{r_2}{r_2^2-1} = \displaystyle \frac{-\sqrt{1-b^2} + |b|i}{[-\sqrt{1-b^2} + |b|i]^2 - 1}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7Br_2%7D%7Br_2%5E2-1%7D+%3D+%5Cdisplaystyle+%5Cfrac%7B-%5Csqrt%7B1-b%5E2%7D+%2B+%7Cb%7Ci%7D%7B%5B-%5Csqrt%7B1-b%5E2%7D+%2B+%7Cb%7Ci%5D%5E2+-+1%7D&bg=ffffff&fg=000000&s=0&c=20201002)



![Q = 2\pi i \left[\displaystyle \frac{r_1}{r_1^2-1} + \displaystyle \frac{r_2}{r_2^2-1} \right] = 2\pi i \left[ \displaystyle \frac{1}{2|b|i} + \frac{1}{2|b| i} \right] = 2\pi i \displaystyle \frac{2}{2|b|i} = \displaystyle \frac{2\pi}{|b|}](https://s0.wp.com/latex.php?latex=Q+%3D+2%5Cpi+i+%5Cleft%5B%5Cdisplaystyle+%5Cfrac%7Br_1%7D%7Br_1%5E2-1%7D+%2B+%5Cdisplaystyle+%5Cfrac%7Br_2%7D%7Br_2%5E2-1%7D+%5Cright%5D+%3D+2%5Cpi+i+%5Cleft%5B+%5Cdisplaystyle+%5Cfrac%7B1%7D%7B2%7Cb%7Ci%7D+%2B+%5Cfrac%7B1%7D%7B2%7Cb%7C+i%7D+%5Cright%5D+%3D+2%5Cpi+i+%5Cdisplaystyle+%5Cfrac%7B2%7D%7B2%7Cb%7Ci%7D+%3D+%5Cdisplaystyle+%5Cfrac%7B2%5Cpi%7D%7B%7Cb%7C%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
. and
and  . Today, I begin the final case of
. Today, I begin the final case of 
 ,
, .
. and
and  ) within the contour for sufficiently large
) within the contour for sufficiently large  (actually, for
(actually, for  since all four poles lie on the unit circle in the complex plane).
since all four poles lie on the unit circle in the complex plane).
 at each pole:
at each pole:


 .
. :
:![Q = \displaystyle \lim_{R \to \infty} \oint_{C_R} \frac{ 2(1+z^2) dz}{z^4 + (4 b^2 - 2) z^2 + 1} = 2\pi i \left[\displaystyle \frac{r_1}{r_1^2-1} + \displaystyle \frac{r_2}{r_2^2-1} \right]](https://s0.wp.com/latex.php?latex=Q+%3D+%5Cdisplaystyle+%5Clim_%7BR+%5Cto+%5Cinfty%7D+%5Coint_%7BC_R%7D+%5Cfrac%7B+2%281%2Bz%5E2%29+dz%7D%7Bz%5E4+%2B+%284+b%5E2+-+2%29+z%5E2+%2B+1%7D+%3D+2%5Cpi+i+%5Cleft%5B%5Cdisplaystyle+%5Cfrac%7Br_1%7D%7Br_1%5E2-1%7D+%2B+%5Cdisplaystyle+%5Cfrac%7Br_2%7D%7Br_2%5E2-1%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002) .
.![= 2\pi \displaystyle \left[ \frac{1-r_1^2}{-2r_1^3 + (4b^2-2) r_1} +\frac{1-r_2^2}{-2r_2^3 + (4b^2-2) r_2} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7B1-r_1%5E2%7D%7B-2r_1%5E3+%2B+%284b%5E2-2%29+r_1%7D+%2B%5Cfrac%7B1-r_2%5E2%7D%7B-2r_2%5E3+%2B+%284b%5E2-2%29+r_2%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 ,
, .
.
 and
and  are the roots of the denominator
are the roots of the denominator  , so that
, so that ,
, .
.![Q = 2\pi \displaystyle \left[ \frac{1-r_1^2}{-2r_1^3 + (4b^2-2) r_1} +\frac{1-r_2^2}{-2r_2^3 + (4b^2-2) r_2} \right]](https://s0.wp.com/latex.php?latex=Q+%3D+2%5Cpi+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7B1-r_1%5E2%7D%7B-2r_1%5E3+%2B+%284b%5E2-2%29+r_1%7D+%2B%5Cfrac%7B1-r_2%5E2%7D%7B-2r_2%5E3+%2B+%284b%5E2-2%29+r_2%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= 2\pi \left[ \displaystyle \frac{1-r_1^2}{r_1 (-2r_1^2 + 4b^2-2)} + \frac{1-r_2^2}{r_2(-2r_2^2 + 4b^2-2)} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+%5Cleft%5B+%5Cdisplaystyle+%5Cfrac%7B1-r_1%5E2%7D%7Br_1+%28-2r_1%5E2+%2B+4b%5E2-2%29%7D+%2B+%5Cfrac%7B1-r_2%5E2%7D%7Br_2%28-2r_2%5E2+%2B+4b%5E2-2%29%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= 2\pi \left[ \displaystyle \frac{1-r_1^2}{r_1 (-2r_1^2 +r_1^2 + r_2^2)} + \frac{1-r_2^2}{r_2(-2r_2^2 + r_1^2 + r_2^2)} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+%5Cleft%5B+%5Cdisplaystyle+%5Cfrac%7B1-r_1%5E2%7D%7Br_1+%28-2r_1%5E2+%2Br_1%5E2+%2B+r_2%5E2%29%7D+%2B+%5Cfrac%7B1-r_2%5E2%7D%7Br_2%28-2r_2%5E2+%2B+r_1%5E2+%2B+r_2%5E2%29%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= 2\pi \left[ \displaystyle \frac{1-r_1^2}{r_1 (-r_1^2 +r_2^2)} + \frac{1-r_2^2}{r_2(r_1^2 -r_2^2)} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+%5Cleft%5B+%5Cdisplaystyle+%5Cfrac%7B1-r_1%5E2%7D%7Br_1+%28-r_1%5E2+%2Br_2%5E2%29%7D+%2B+%5Cfrac%7B1-r_2%5E2%7D%7Br_2%28r_1%5E2+-r_2%5E2%29%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= 2\pi \left[ \displaystyle \frac{r_1^2-1}{r_1 (r_1^2 -r_2^2)} + \frac{1-r_2^2}{r_2(r_1^2 -r_2^2)} \right]](https://s0.wp.com/latex.php?latex=%3D+2%5Cpi+%5Cleft%5B+%5Cdisplaystyle+%5Cfrac%7Br_1%5E2-1%7D%7Br_1+%28r_1%5E2+-r_2%5E2%29%7D+%2B+%5Cfrac%7B1-r_2%5E2%7D%7Br_2%28r_1%5E2+-r_2%5E2%29%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)


 ,
, .
. .
.





 ,
,  ,
,  , and
, and  . Of these, only two (
. Of these, only two ( ,
, ,
, .
. .
. , and each pole has order one. As shown earlier in this series, the residue at such pole is equal to
, and each pole has order one. As shown earlier in this series, the residue at such pole is equal to .
. and
and  so that
so that  , and so the residue at
, and so the residue at ![\displaystyle \frac{2(1+[ir_1]^2)}{4 [ir_1]^3 + 2(4b^2-2) [ir_1]} = \displaystyle \frac{-i(1-r_1^2)}{-2r_1^3 + (4b^2-2) r_1}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7B2%281%2B%5Bir_1%5D%5E2%29%7D%7B4+%5Bir_1%5D%5E3+%2B+2%284b%5E2-2%29+%5Bir_1%5D%7D+%3D+%5Cdisplaystyle+%5Cfrac%7B-i%281-r_1%5E2%29%7D%7B-2r_1%5E3+%2B+%284b%5E2-2%29+r_1%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \frac{2(1+[ir_2]^2)}{4 [ir_2]^3 + 2(4b^2-2) [ir_2]} = \displaystyle \frac{-i(1-r_2^2)}{-2r_2^3 + (4b^2-2) r_2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7B2%281%2B%5Bir_2%5D%5E2%29%7D%7B4+%5Bir_2%5D%5E3+%2B+2%284b%5E2-2%29+%5Bir_2%5D%7D+%3D+%5Cdisplaystyle+%5Cfrac%7B-i%281-r_2%5E2%29%7D%7B-2r_2%5E3+%2B+%284b%5E2-2%29+r_2%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![Q = \displaystyle \lim_{R \to \infty} \oint_{C_R} \frac{ 2(1+z^2) dz}{z^4 + (4 b^2 - 2) z^2 + 1} = 2\pi i \left[\frac{-i(1-r_1^2)}{-2r_1^3 + (4b^2-2) r_1} +\frac{-i(1-r_2^2)}{-2r_2^3 + (4b^2-2) r_2} \right]](https://s0.wp.com/latex.php?latex=Q+%3D+%5Cdisplaystyle+%5Clim_%7BR+%5Cto+%5Cinfty%7D+%5Coint_%7BC_R%7D+%5Cfrac%7B+2%281%2Bz%5E2%29+dz%7D%7Bz%5E4+%2B+%284+b%5E2+-+2%29+z%5E2+%2B+1%7D+%3D+2%5Cpi+i+%5Cleft%5B%5Cfrac%7B-i%281-r_1%5E2%29%7D%7B-2r_1%5E3+%2B+%284b%5E2-2%29+r_1%7D+%2B%5Cfrac%7B-i%281-r_2%5E2%29%7D%7B-2r_2%5E3+%2B+%284b%5E2-2%29+r_2%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)






 to show that
to show that  .
. , so that
, so that  is a constant with respect to
is a constant with respect to  does not depend on
does not depend on ![Q'(a) = \displaystyle 2 \int_{-\infty}^{\infty} \frac{ 2a \left[ (a^2+b^2)^2 v^2 + b^2\right] - 2 (a^2+b^2) \cdot (a^2+b^2) v^2 \cdot 2a }{\left[ (a^2+b^2)^2 v^2 + b^2 \right]^2} dv](https://s0.wp.com/latex.php?latex=Q%27%28a%29+%3D+%5Cdisplaystyle+2+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+%5Cfrac%7B+2a+%5Cleft%5B+%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%2B+b%5E2%5Cright%5D+-+2+%28a%5E2%2Bb%5E2%29+%5Ccdot+%28a%5E2%2Bb%5E2%29+v%5E2+%5Ccdot+2a+%7D%7B%5Cleft%5B+%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%2B+b%5E2+%5Cright%5D%5E2%7D+dv&bg=ffffff&fg=000000&s=0&c=20201002)
![Q'(a) = \displaystyle 4a \int_{-\infty}^{\infty} \frac{(a^2+b^2)^2 v^2 + b^2- 2 (a^2+b^2)^2 v^2}{\left[ (a^2+b^2)^2 v^2 + b^2 \right]^2} dv](https://s0.wp.com/latex.php?latex=Q%27%28a%29+%3D+%5Cdisplaystyle+4a+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+%5Cfrac%7B%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%2B+b%5E2-+2+%28a%5E2%2Bb%5E2%29%5E2+v%5E2%7D%7B%5Cleft%5B+%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%2B+b%5E2+%5Cright%5D%5E2%7D+dv&bg=ffffff&fg=000000&s=0&c=20201002)
![Q'(a) = \displaystyle 4a \int_{-\infty}^{\infty} \frac{b^2-(a^2+b^2)^2 v^2}{\left[ (a^2+b^2)^2 v^2 + b^2 \right]^2} dv](https://s0.wp.com/latex.php?latex=Q%27%28a%29+%3D+%5Cdisplaystyle+4a+%5Cint_%7B-%5Cinfty%7D%5E%7B%5Cinfty%7D+%5Cfrac%7Bb%5E2-%28a%5E2%2Bb%5E2%29%5E2+v%5E2%7D%7B%5Cleft%5B+%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%2B+b%5E2+%5Cright%5D%5E2%7D+dv&bg=ffffff&fg=000000&s=0&c=20201002)
 , so that
, so that![(a^2+b^2)^2 v^2 = (a^2+b^2)^2 \displaystyle \left[ \frac{b}{a^2+b^2} \tan \theta \right]^2 = b^2 \tan^2 \theta](https://s0.wp.com/latex.php?latex=%28a%5E2%2Bb%5E2%29%5E2+v%5E2+%3D+%28a%5E2%2Bb%5E2%29%5E2+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bb%7D%7Ba%5E2%2Bb%5E2%7D+%5Ctan+%5Ctheta+%5Cright%5D%5E2+%3D+b%5E2+%5Ctan%5E2+%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
 to
to  , and so
, and so![Q'(a) = \displaystyle 4a \int_{-\pi/2}^{\pi/2} \frac{b^2- b^2 \tan^2 \theta}{\left[ b^2 \tan^2 \theta + b^2 \right]^2} \frac{b}{a^2+b^2} \sec^2 \theta \, d\theta](https://s0.wp.com/latex.php?latex=Q%27%28a%29+%3D+%5Cdisplaystyle+4a+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5Cfrac%7Bb%5E2-+b%5E2+%5Ctan%5E2+%5Ctheta%7D%7B%5Cleft%5B+b%5E2+%5Ctan%5E2+%5Ctheta+%2B+b%5E2+%5Cright%5D%5E2%7D+%5Cfrac%7Bb%7D%7Ba%5E2%2Bb%5E2%7D+%5Csec%5E2+%5Ctheta+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} \frac{[1- \tan^2 \theta] \sec^2 \theta}{\left[ \tan^2 \theta +1 \right]^2} d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5Cfrac%7B%5B1-+%5Ctan%5E2+%5Ctheta%5D+%5Csec%5E2+%5Ctheta%7D%7B%5Cleft%5B+%5Ctan%5E2+%5Ctheta+%2B1+%5Cright%5D%5E2%7D+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} \frac{[1-\tan^2 \theta] \sec^2 \theta}{\left[ \sec^2 \theta \right]^2} d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5Cfrac%7B%5B1-%5Ctan%5E2+%5Ctheta%5D+%5Csec%5E2+%5Ctheta%7D%7B%5Cleft%5B+%5Csec%5E2+%5Ctheta+%5Cright%5D%5E2%7D+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} \frac{[1-\tan^2 \theta] \sec^2 \theta}{\sec^4 \theta} d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5Cfrac%7B%5B1-%5Ctan%5E2+%5Ctheta%5D+%5Csec%5E2+%5Ctheta%7D%7B%5Csec%5E4+%5Ctheta%7D+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} \frac{[1- \tan^2 \theta]}{\sec^2 \theta} d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5Cfrac%7B%5B1-+%5Ctan%5E2+%5Ctheta%5D%7D%7B%5Csec%5E2+%5Ctheta%7D+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} [1- \tan^2 \theta] \cos^2 \theta \, d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5B1-+%5Ctan%5E2+%5Ctheta%5D+%5Ccos%5E2+%5Ctheta+%5C%2C+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{4ab^3}{a^2+b^2} \int_{-\pi/2}^{\pi/2} [\cos^2 \theta -\sin^2 \theta] d\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B4ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cint_%7B-%5Cpi%2F2%7D%5E%7B%5Cpi%2F2%7D+%5B%5Ccos%5E2+%5Ctheta+-%5Csin%5E2+%5Ctheta%5D+d%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002)

![= \displaystyle \left[ \frac{2ab^3}{a^2+b^2} \sin 2\theta \right]^{\pi/2}_{-\pi/2}](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7B2ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Csin+2%5Ctheta+%5Cright%5D%5E%7B%5Cpi%2F2%7D_%7B-%5Cpi%2F2%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{2ab^3}{a^2+b^2} \left[ \sin \pi - \sin (-\pi) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B2ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cleft%5B+%5Csin+%5Cpi+-+%5Csin+%28-%5Cpi%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{2ab^3}{a^2+b^2} \left[ 0- 0 \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B2ab%5E3%7D%7Ba%5E2%2Bb%5E2%7D+%5Cleft%5B+0-+0+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. cases yet not always be true. We’ve also explored the computational evidence for various unsolved problems in mathematics, noting that even this very strong computational evidence, by itself, does not provide a proof for all possible cases.
cases yet not always be true. We’ve also explored the computational evidence for various unsolved problems in mathematics, noting that even this very strong computational evidence, by itself, does not provide a proof for all possible cases. is a continuous function on the interval
is a continuous function on the interval ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=000000&s=0&c=20201002) which is differentiable on the interior
which is differentiable on the interior  , then there is a point
, then there is a point  so that
so that

 in
in  and
and  , then there is a point
, then there is a point  .
.
 ,
,
 satisfies the hypotheses of Rolle’s Theorem and conclude that there must be a point so that
satisfies the hypotheses of Rolle’s Theorem and conclude that there must be a point so that  , from which we obtain the conclusion of the Mean Value Theorem.
, from which we obtain the conclusion of the Mean Value Theorem. , we have
, we have  .
. , we have
, we have  .
.

![= \displaystyle \lim_{h \to 0} \left[ n x^{n-1} + \frac{1}{2} n(n-1) x^{n-2} h + \dots + h^{n-1} \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Clim_%7Bh+%5Cto+0%7D+%5Cleft%5B+n+x%5E%7Bn-1%7D+%2B+%5Cfrac%7B1%7D%7B2%7D+n%28n-1%29+x%5E%7Bn-2%7D+h+%2B+%5Cdots+%2B+h%5E%7Bn-1%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)


 , then the theorem is trivially true since
, then the theorem is trivially true since  , and the derivative of a constant is zero.
, and the derivative of a constant is zero. , where
, where  is a positive integer. Then, using the Quotient Rule,
is a positive integer. Then, using the Quotient Rule,


 , where
, where  and
and  are integers. Suppose that
are integers. Suppose that  . Then:
. Then:
![y^q = \displaystyle \left[ x^{p/q} \right]^q](https://s0.wp.com/latex.php?latex=y%5Eq+%3D+%5Cdisplaystyle+%5Cleft%5B+x%5E%7Bp%2Fq%7D+%5Cright%5D%5Eq&bg=ffffff&fg=000000&s=0&c=20201002)


![\displaystyle \frac{dy}{dx} = \displaystyle \frac{p}{q} \frac{x^{p-1}}{[x^{p/q}]^{q-1}}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7Bdy%7D%7Bdx%7D+%3D+%5Cdisplaystyle+%5Cfrac%7Bp%7D%7Bq%7D+%5Cfrac%7Bx%5E%7Bp-1%7D%7D%7B%5Bx%5E%7Bp%2Fq%7D%5D%5E%7Bq-1%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002)