In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We previously showed that if the motion of a planet around the Sun is expressed in polar coordinates 
where 






the second equation arises since
In the next few posts, we’ll discuss the solution of this initial-value problem. Today’s post would be appropriate for calculus students, which is confirming that
solves this initial-value problem, where 

As we’ve already seen in this series, this means that the orbit of the planet is a conic section — either a circle, ellipse, parabola, or hyperbola. Since the orbit of a planet is stable and 

So, for a calculus student to verify that planets move in ellipses, one must check that
is a solution of the initial-value problem


The second line is easy to check:





The third line is also easy to check:
To check the first line, we first find 

so that

thus confirming that 
While the above calculations are well within the grasp of a good Calculus I student, I’ll be the first to admit that this solution is less than satisfying. We just mysteriously proposed a solution, seemingly out of thin air, and confirmed that it worked. In the next post, I’ll proposed a way that calculus students can be led to guess this solution. Then, we talk about finding the solution of this nonhomogeneous initial-value problem using standard techniques from differential equations.
 ,
, and the acceleration
and the acceleration  are vectors. When written in polar coordinates, this becomes
are vectors. When written in polar coordinates, this becomes![{\bf F} = m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + m \left(r \frac{d^2 \theta}{d t^2} + 2 \frac{dr}{dt} \frac{d\theta}{dt} \right) {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%7B%5Cbf+F%7D+%3D+m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+m+%5Cleft%28r+%5Cfrac%7Bd%5E2+%5Ctheta%7D%7Bd+t%5E2%7D+%2B+2+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) ,
, is a unit vector pointing away from the origin and
is a unit vector pointing away from the origin and  is a unit vector perpendicular to
is a unit vector perpendicular to  .
. ,
, is the mass of the sun,
is the mass of the sun,  is the mass of the planet, and
is the mass of the planet, and  is the gravitational constant of the universe (which is a constant, no matter what
is the gravitational constant of the universe (which is a constant, no matter what ![m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] = \displaystyle -\frac{GMm}{r^2}](https://s0.wp.com/latex.php?latex=m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%3D+%5Cdisplaystyle+-%5Cfrac%7BGMm%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002) ,
, .
. ,
, is a constant, and
is a constant, and .
.


![\displaystyle \frac{\ell^2}{m^2 r^2} \left[ \frac{d^2}{d\theta^2} \left( \frac{1}{r} \right) + \frac{1}{r} \right] = \displaystyle \frac{GM}{r^2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2+r%5E2%7D+%5Cleft%5B+%5Cfrac%7Bd%5E2%7D%7Bd%5Ctheta%5E2%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%2B+%5Cfrac%7B1%7D%7Br%7D+%5Cright%5D++%3D+%5Cdisplaystyle+%5Cfrac%7BGM%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. , we finally obtain the governing equation
, we finally obtain the governing equation .
. as the constant on the right-hand side instead of just
as the constant on the right-hand side instead of just  ,
, are vectors. In usual rectangular coordinates, the acceleration vector would be expressed as
are vectors. In usual rectangular coordinates, the acceleration vector would be expressed as ,
, and
and  directors are
directors are  and
and  , and the unit vectors
, and the unit vectors  and
and  are perpendicular, pointing in the positive
are perpendicular, pointing in the positive  and positive
and positive  directions.
directions. . This may be rewritten as
. This may be rewritten as ,
,
 .
.
 .
. .
. .
. , or a distance
, or a distance 

 .
.


![= \displaystyle \left[ \frac{d^2r}{dt^2} - r \left(\frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + \left[ 2\frac{dr}{dt} \frac{d\theta}{dt} + r \frac{d^2\theta}{dt^2} \right] {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-++r+%5Cleft%28%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+%5Cleft%5B+2%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%2B+r+%5Cfrac%7Bd%5E2%5Ctheta%7D%7Bdt%5E2%7D+%5Cright%5D+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) .
. ,
, ;
; in a form that depends only on
in a form that depends only on 


 .
. .
.


![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ \frac{dr}{dt} \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ - \frac{\ell}{m} \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+-+%5Cfrac%7B%5Cell%7D%7Bm%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle - \frac{\ell^2}{m^2r^2} \frac{d}{d\theta} \left[ \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+-+%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2r%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. .
. , or
, or .
. .
. .
. .
. . Then
. Then






 into a calculator, then entering
into a calculator, then entering  , and then repeatedly hitting the
, and then repeatedly hitting the  button.
button. .
. .
. . Unfortunately, if we start with a guess near this root, like
. Unfortunately, if we start with a guess near this root, like  , the sequence unexpectedly diverges from
, the sequence unexpectedly diverges from  but eventually converges to the positive root
but eventually converges to the positive root  :
:
















 north,
north,  west, which is about 40 miles NNW of Spokane. (Images made by
west, which is about 40 miles NNW of Spokane. (Images made by 

 north,
north,  west — which is indeed in Spokane — and then misconverted from decimal notation to minutes and seconds.
west — which is indeed in Spokane — and then misconverted from decimal notation to minutes and seconds.

 . Furthermore, if
. Furthermore, if  , then this represents an ellipse with eccentricity
, then this represents an ellipse with eccentricity  whose major axis lies on the
whose major axis lies on the  . Under this assumption,
. Under this assumption,  and
and  , so let me rewrite the previous equation in terms of
, so let me rewrite the previous equation in terms of  :
:
 ,
,
 from the center to the foci satisfies
from the center to the foci satisfies ,
,


 , this means that the origin is, once again, one of the foci of the hyperbola.
, this means that the origin is, once again, one of the foci of the hyperbola. of the hyperbola is easily computed as
of the hyperbola is easily computed as ,
,

 . With this substitution, the equation in rectangular coordinates simplifies to
. With this substitution, the equation in rectangular coordinates simplifies to .
. , so that
, so that  . Then the equation in rectangular coordinates simplifies to
. Then the equation in rectangular coordinates simplifies to 


 .
. ,
, to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line
to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line  , located
, located  to the right of the vertex.)
to the right of the vertex.)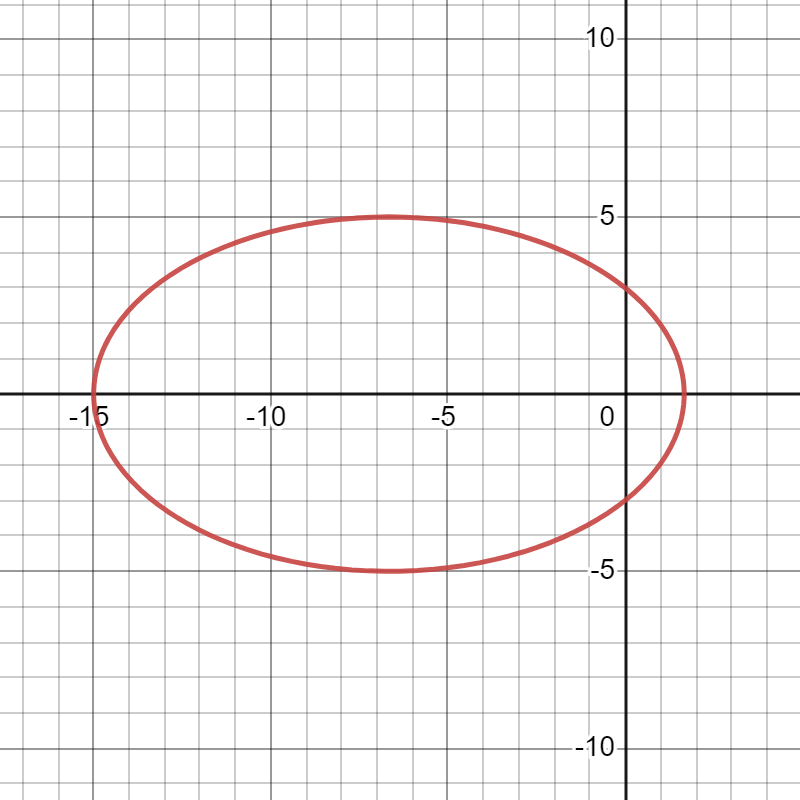
 .
.








 so that
so that .
. ,
, ,
, ,
, .
. ,
,



 . Therefore, since the foci of the ellipse are distance
. Therefore, since the foci of the ellipse are distance  , or
, or  . That is, the origin is one focus of the ellipse. (For the little it’s worth, the other focus is located at
. That is, the origin is one focus of the ellipse. (For the little it’s worth, the other focus is located at  .
. .
. . For this ellipse, the planet’s closest approach to the Sun occurs at
. For this ellipse, the planet’s closest approach to the Sun occurs at  ,
, :
: .
. of the major axis of the ellipse is the sum of these two distances:
of the major axis of the ellipse is the sum of these two distances:

 .
. , we can also compute
, we can also compute 





