In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We previously showed that if the motion of a planet around the Sun is expressed in polar coordinates 
where 






the second equation arises since

In the previous post, we confirmed that

solved this initial-value problem. However, the solution was unsatisfying because it gave no indication of where this guess might have come from. In this post, I suggest a series of questions that good calculus students could be asked that would hopefully lead them quite naturally to this solution.
Step 1. Let’s make the differential equation simpler, for now, by replacing the right-hand side with 0:
,
or
.
Can you think of a function or two that, when you differentiate twice, you get the original function back, except with a minus sign in front?
Answer to Step 1. With a little thought, hopefully students can come up with the standard answers of 

Step 2. Using these two answers, can you think of a third function that works?
Answer to Step 2. This is usually the step that students struggle with the most, as they usually try to think of something completely different that works. This won’t work, but that’s OK… we all learn from our failures. If they can’t figure out, I’ll give a big hint: “Try multiplying one of these two answers by something.” In time, they’ll see that answers like 



Step 3. Using these two answers, can you think of anything else that works?
Answer to Step 3. Again, students might struggle as they imagine something else that works. If this goes on for too long, I’ll give a big hint: “Try combining them.” Eventually, we hopefully get to the point that they’ll see that the linear combination 
Step 4. Let’s now switch back to the original differential equation
. Can you think of an easy function that’s a solution?
Answer to Step 4. This might take some experimentation, and students will probably try unnecessarily complicated guesses first. If this goes on for too long, I’ll give a big hint: “Try a constant.” Eventually, they hopefully determine that if 


Step 5. Let’s return to
Answer to Step 5. Hopefully, students quickly realize that the constant function 
Step 6. Let’s review. We’ve shown that anything of the form
is a solution of
is a solution of
Answer to Step 6. Hopefully, with the experience learned from Step 3, students will guess that 
Step 7. OK, that solves the differential equation. Any thoughts on how to find the values of
and
so that
and
?
Answer to Step 7. Hopefully, students will see that we should just plug into 




To find 



From these two constants, we obtain


where 
Finally, since 
so that, as shown earlier in this series, the orbit is an ellipse with eccentricity 
 , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
, with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation  . Since
. Since  is the reciprocal of
is the reciprocal of  is extremely unlikely, this means that the planet orbits the Sun in an ellipse, with the Sun at one focus of the ellipse.
is extremely unlikely, this means that the planet orbits the Sun in an ellipse, with the Sun at one focus of the ellipse.




 .
.
 .
. :
: ,
, ,
,
 ,
, and the acceleration
and the acceleration  are vectors. When written in polar coordinates, this becomes
are vectors. When written in polar coordinates, this becomes![{\bf F} = m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + m \left(r \frac{d^2 \theta}{d t^2} + 2 \frac{dr}{dt} \frac{d\theta}{dt} \right) {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%7B%5Cbf+F%7D+%3D+m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+m+%5Cleft%28r+%5Cfrac%7Bd%5E2+%5Ctheta%7D%7Bd+t%5E2%7D+%2B+2+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) ,
, is a unit vector pointing away from the origin and
is a unit vector pointing away from the origin and  is a unit vector perpendicular to
is a unit vector perpendicular to  .
. ,
, is the mass of the sun,
is the mass of the sun,  is the mass of the planet, and
is the mass of the planet, and  is the gravitational constant of the universe (which is a constant, no matter what
is the gravitational constant of the universe (which is a constant, no matter what ![m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] = \displaystyle -\frac{GMm}{r^2}](https://s0.wp.com/latex.php?latex=m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%3D+%5Cdisplaystyle+-%5Cfrac%7BGMm%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002) ,
, .
. ,
, is a constant, and
is a constant, and .
.


![\displaystyle \frac{\ell^2}{m^2 r^2} \left[ \frac{d^2}{d\theta^2} \left( \frac{1}{r} \right) + \frac{1}{r} \right] = \displaystyle \frac{GM}{r^2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2+r%5E2%7D+%5Cleft%5B+%5Cfrac%7Bd%5E2%7D%7Bd%5Ctheta%5E2%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%2B+%5Cfrac%7B1%7D%7Br%7D+%5Cright%5D++%3D+%5Cdisplaystyle+%5Cfrac%7BGM%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002)
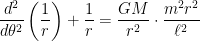
 .
. , we finally obtain the governing equation
, we finally obtain the governing equation .
. as the constant on the right-hand side instead of just
as the constant on the right-hand side instead of just  ,
, ,
, and
and  directors are
directors are  and
and  , and the unit vectors
, and the unit vectors  and
and  are perpendicular, pointing in the positive
are perpendicular, pointing in the positive  and positive
and positive  directions.
directions. . This may be rewritten as
. This may be rewritten as ,
,
 .
.
 .
. .
. .
. , or a distance
, or a distance 

 .
.


![= \displaystyle \left[ \frac{d^2r}{dt^2} - r \left(\frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + \left[ 2\frac{dr}{dt} \frac{d\theta}{dt} + r \frac{d^2\theta}{dt^2} \right] {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-++r+%5Cleft%28%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+%5Cleft%5B+2%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%2B+r+%5Cfrac%7Bd%5E2%5Ctheta%7D%7Bdt%5E2%7D+%5Cright%5D+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) .
. ,
, ;
; in a form that depends only on
in a form that depends only on 


 .
. .
.


![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ \frac{dr}{dt} \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ - \frac{\ell}{m} \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+-+%5Cfrac%7B%5Cell%7D%7Bm%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle - \frac{\ell^2}{m^2r^2} \frac{d}{d\theta} \left[ \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+-+%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2r%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. .
. , or
, or .
. .
. .
. .
. . Then
. Then






 into a calculator, then entering
into a calculator, then entering  , and then repeatedly hitting the
, and then repeatedly hitting the  button.
button. .
. .
. . Unfortunately, if we start with a guess near this root, like
. Unfortunately, if we start with a guess near this root, like  , the sequence unexpectedly diverges from
, the sequence unexpectedly diverges from  but eventually converges to the positive root
but eventually converges to the positive root  :
:
















 north,
north,  west, which is about 40 miles NNW of Spokane. (Images made by
west, which is about 40 miles NNW of Spokane. (Images made by 

 north,
north,  west — which is indeed in Spokane — and then misconverted from decimal notation to minutes and seconds.
west — which is indeed in Spokane — and then misconverted from decimal notation to minutes and seconds.

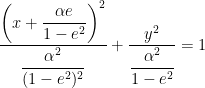
 . Furthermore, if
. Furthermore, if  , then this represents an ellipse with eccentricity
, then this represents an ellipse with eccentricity  whose major axis lies on the
whose major axis lies on the  . Under this assumption,
. Under this assumption,  and
and  , so let me rewrite the previous equation in terms of
, so let me rewrite the previous equation in terms of  :
:
 ,
,
 from the center to the foci satisfies
from the center to the foci satisfies ,
,


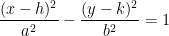
 , this means that the origin is, once again, one of the foci of the hyperbola.
, this means that the origin is, once again, one of the foci of the hyperbola. of the hyperbola is easily computed as
of the hyperbola is easily computed as ,
,

 . With this substitution, the equation in rectangular coordinates simplifies to
. With this substitution, the equation in rectangular coordinates simplifies to .
. , so that
, so that  . Then the equation in rectangular coordinates simplifies to
. Then the equation in rectangular coordinates simplifies to 


 .
. ,
, to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line
to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line  , located
, located  to the right of the vertex.)
to the right of the vertex.)