In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We previously showed that if the motion of a planet around the Sun is expressed in polar coordinates , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
,
where and is a certain constant. We will also impose the initial condition that the planet is at perihelion (i.e., is closest to the sun), at a distance of , when . This means that obtains its maximum value of when . This leads to the two initial conditions
;
the second equation arises since has a local extremum at .
In the next few posts, we’ll discuss the solution of this initial-value problem. Today’s post would be appropriate for calculus students, which is confirming that
solves this initial-value problem, where . Since is the reciprocal of , we infer that
.
As we’ve already seen in this series, this means that the orbit of the planet is a conic section — either a circle, ellipse, parabola, or hyperbola. Since the orbit of a planet is stable and is extremely unlikely, this means that the planet orbits the Sun in an ellipse, with the Sun at one focus of the ellipse.
So, for a calculus student to verify that planets move in ellipses, one must check that
is a solution of the initial-value problem
,
,
.
The second line is easy to check:
.
The third line is also easy to check:
.
To check the first line, we first find :
,
so that
,
thus confirming that solves the initial-value problem.
While the above calculations are well within the grasp of a good Calculus I student, I’ll be the first to admit that this solution is less than satisfying. We just mysteriously proposed a solution, seemingly out of thin air, and confirmed that it worked. In the next post, I’ll proposed a way that calculus students can be led to guess this solution. Then, we talk about finding the solution of this nonhomogeneous initial-value problem using standard techniques from differential equations.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
In this post, following from the previous two posts, we will show that if the motion of a planet around the Sun is expressed in polar coordinates , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
,
where and is a certain constant. Deriving this governing differential equation will require some principles from physics. If you’d rather skip the physics and get to the mathematics, we’ll get to solving this differential equations in the next post.
From Newton’s second law, the gravitational force on the planet as it orbits the Sun satisfies
,
where the force and the acceleration are vectors. When written in polar coordinates, this becomes
,
where is a unit vector pointing away from the origin and is a unit vector perpendicular to that points in the direction of increasing .
Furthermore, from Newton’s Law of Gravitation, if the Sun is located at the origin, then the gravitational force on the planet is
,
where is the mass of the sun, is the mass of the planet, and is the gravitational constant of the universe (which is a constant, no matter what Q from Star Trek: The Next Generation says).
Since these are the same force, the components must be the same. (Also, the component must be zero, but we won’t need to use that fact.) Therefore,
,
or
.
In a previous post, we showed that
,
where is a constant, and
.
Substituting, we find
.
So, substituting and , we finally obtain the governing equation
.
This is the governing differential equation of planetary motion under Newtonian mechanics. For now, it’s not obvious why we chose as the constant on the right-hand side instead of just , but the reason for this choice will become apparent in future posts.
In the next few posts, we use differential equations (or, if you’d prefer, just calculus) to show that Newtonian mechanics predicts that planets orbit the Sun in ellipses.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
In this part of the series, we will show that if the motion of a planet around the Sun is expressed in polar coordinates , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
,
where and is a certain constant. Deriving this governing differential equation will require some principles from physics. If you’d rather skip the physics and get to the mathematics, we’ll get to solving this differential equations in the next post.
Part of the derivation of this governing differential equation will involve Newton’s Second Law
,
where is the mass of the planet and the force and the acceleration are vectors. In usual rectangular coordinates, the acceleration vector would be expressed as
,
where the components of the acceleration in the and directors are and , and the unit vectors and are perpendicular, pointing in the positive and positive directions.
Unfortunately, our problem involves polar coordinates, and rewriting the acceleration vector in polar coordinates, instead of rectangular coordinates, is going to take some work.
Suppose that the position of the planet is in polar coordinates, so that the position in rectangular coordinates is . This may be rewritten as
,
where
is a unit vector that points away from the origin. We see that this is a unit vector since
.
We also define
to be a unit vector that is perpendicular to ; it turns out that points in the direction of increasing . To see that and are perpendicular, we observe
.
Computing the velocity and acceleration vectors in polar coordinates will have a twist that’s not experienced with rectangular coordinates since both and are functions of . Indeed, we have
.
Furthermore,
.
These two equations will be needed in the derivation below.
We are now in position to express the velocity and acceleration of the orbiting planet in polar coordinates. Clearly, the position of the planet is , or a distance from the origin in the direction of . Therefore, by the Product Rule, the velocity of the planet is
We now apply the Chain Rule to the second term:
.
Differentiating a second time with respect to time, and again using the Chain Rule, we find
.
This will be needed in the next post, when we use both Newton’s Second Law and Newton’s Law of Gravitation, expressed in polar coordinates.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
In this part of the series, we will show that if the motion of a planet around the Sun is expressed in polar coordinates , with the Sun at the origin, then under Newtonian mechanics (i.e., without general relativity) the motion of the planet follows the differential equation
,
where and is a certain constant. Deriving this governing differential equation will require some principles from physics. If you’d rather skip the physics and get to the mathematics, we’ll get to solving this differential equations in a few posts.
One principle from physics that we’ll need is the Law of Conservation of Angular Momentum. Mathematically, this is expressed by
,
where is a constant. Of course, this can be written as
;
this will be used a couple times in the derivation below.
As we’ll soon see, we will need to express the second derivative in a form that depends only on . To do this, we use the Chain Rule to obtain
.
This last step used the Chain Rule in reverse:
.
To examine the second derivative , we again use the Chain Rule:
.
While far from obvious now, this will be needed when we rewrite Newton’s Second Law in polar coordinates.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
One technique that will be necessary for this confirmation is the method of successive approximations. This will be needed in the context of a differential equation; however, we can illustrate the concept by finding the roots of a polynomial. Consider the quadratic equation
.
(Naturally, we can solve for using the quadratic formula; more on that later.) To apply the method of successive approximation, we will rewrite this so that appears on the left side and some function of appears on the right side. I will choose
, or
.
Here’s the idea of the method of successive approximations to obtain a recursively defined sequence that (hopefully) convergence to a solution of this equation:
Start with an initial guess .
Plug into the right-hand side to get a new guess, .
Plug into the right-hand side to get a new guess, .
And repeat.
For example, suppose that we choose . Then
This sequence can be computed by entering into a calculator, then entering , and then repeatedly hitting the button.
We see that the sequence appears to be converging to something, and that something is a root of the equation , which we now find via the quadratic formula:
.
So it looks like the above sequence is converging to the positive root .
(Parenthetically, you might notice that the Fibonacci sequence appears in the numerators and denominators of this sequence. As you might guess, that’s not a coincidence.)
Like most numerical techniques, this method doesn’t always work like we think it would. Another solution is the negative root . Unfortunately, if we start with a guess near this root, like , the sequence unexpectedly diverges from but eventually converges to the positive root :
I should note that the method of successive approximations generally converges at a slower pace than Newton’s method. However, this method will be good enough when we use it to predict the precession in Mercury’s orbit.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
In a previous post, we showed that the polar equation
is equivalent to the rectangular equation
as long as . Furthermore, if , then this represents an ellipse with eccentricity whose major axis lies on the axis, with one focus located at the origin.
While not directly related to our discussion of precession, it turns out that this equation represents a hyperbola if . Under this assumption, and , so let me rewrite the previous equation in terms of :
This matches the form of a left-right hyperbola
,
where the center of the hyperbola is located at
Also, for a hyperbola, the distance from the center to the foci satisfies
,
so that
The two foci are located a distance to the left of the right of the center. Since it happened to happen that , this means that the origin is, once again, one of the foci of the hyperbola.
Furthermore, the eccentricity of the hyperbola is easily computed as
,
so that, once again, the well-chosen parameter is the eccentricity.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
In the previous post, we showed that the polar equation
converts to
in rectangular coordinates. Furthermore, if , then this represents an ellipse with eccentricity whose semi-major axis lies along the axis with one focus at the origin.
It turns out that, for different non-negative values of , the same polar equation represents different conic sections. These are not particularly relevant for our study of precession, but I’m including this anyway in this series as a small tangential discussion.
Let’s take a look at the easy case of . With this substitution, the equation in rectangular coordinates simplifies to
.
Of course, this is the equation of a circle that is centered at the origin with radius .
The other easy case is , so that . Then the equation in rectangular coordinates simplifies to
This matches the form of a parabola that opens to the left with a horizontal axis of symmetry:
.
In this case, the vertex of the parabola is located at
,
while the focus of the parabola is located a distance to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line , located to the right of the vertex.)
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
As part of our derivation, we’ll need to use the fact that, in polar coordinates, the graph of
turns out to be an ellipse if , with the origin at one focus.
We now prove this. Clearing the denominator, we obtain
.
Switching to rectangular coordinates, this becomes
Since we assumed that , we have so that
.
Therefore, this matches the usual form of an ellipse in rectangular coordinates
,
where the center of the ellipse is located at
,
the semi-major axis is horizontal with length
,
and the semi-minor axis is vertical with length
.
Furthermore, the distance of the foci from the center of the ellipse satisfies the equation
,
so that
From this, we derive two nice properties of the ellipse. First, looking back on previous work, we see that . Therefore, since the foci of the ellipse are distance away from the center along the major axis, we conclude that one focus of the ellipse is located at , or . That is, the origin is one focus of the ellipse. (For the little it’s worth, the other focus is located at .
Second, the eccentricity of the ellipse is defined to be the ratio . This is now easily computed:
.
In other words, the letter was well-chosen to represent the eccentricity of the ellipse.
For what it’s worth, here’s an alternate derivation of the formulas for and . For this ellipse, the planet’s closest approach to the Sun occurs at :
,
and the planet’s further distance from the Sun occurs at :
.
Therefore, the length of the major axis of the ellipse is the sum of these two distances:
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
But what is precession? To explore this concept, let’s explore the graph of
for various values of , , and using Desmos. (Note that, in this context, the number does not mean Euler’s constant . The reason for choosing the letter for this parameter will become clear shortly.) Naturally, this demonstration could also be done with other tools like a graphing calculator.
I suggest beginning by setting and and altering the value of . This is the easiest behavior to explain. From the equation, is directly proportional to the distance from the origin . So, not surprisingly, increasing produces a larger graph, and decreasing produces a smaller graph.
Second, I suggest setting and but altering the value of . Starting at , the graph is a circle. This makes complete sense: if , then the equation simply becomes , so the distance from the origin is the same for all angles. However, as increases, the original circle becomes more and more stretched out. We will prove this analytically in a later post, but it turns out that, for , the graph is an ellipse, and the origin is one of the foci of the ellipse. The number is called the eccentricity of the ellipse (hence the letter ).
Again, if the value of is fixed but varies, the graph becomes either larger or smaller as becomes larger or smaller.
We notice that if and , then the denominator of
varies between and . In particular, the denominator is always positive. Therefore, the value of is least positive — the graph is closest to the origin — when the denominator is greatest. This happens when is a multiple of . So, for example, when , then is as close as the graph gets to the origin. Let’s call this closest distance ; in the context of a planet’s orbit around the sun, this represent perihelion. Then we have .
When , the graph switches from an ellipse to a parabola, where the origin is the focus of the parabola. For , the graph becomes a hyperbola. However, since we’re mostly going to be concerned with stable planetary orbits in this series, we won’t dwell too much on the case .
Third, I suggest setting , , and then alter the value of . For , the graph is simply a single ellipse. However, by changing the value of , the graph changes into a spiral.
In the above figure, the spiral stopped “spiraling” because I had asked Desmos only to show the graph between . If I had changed the upper bound to something larger than , the spiral would continue.
The precession in the spiral is defined to be the angular offset between each loop of the spiral. Clearly, this is a function of . To find this function, we again examine the function
Once again, if , then the denominator varies between and . In particular, the denominator is always positive. Therefore, the value of is least positive when the denominator is greatest, and the denominator is greatest when is a multiple of . So, for example, when , then is as close as the graph gets to the origin.
When does the graph return to its closest point to the origin next? This would occur when , or . If , then the angle of closest approach to the origin would , and the graph simply cycles over itself. However, if , then this angle will be larger than , thus producing a spiral. Indeed, the amount of precession would be equal to
.
In the picture above, . Therefore, the amount of precession would be radians . Therefore, after 19 “leafs” of the spiral, the graph would begin to cycle on top of itself.
In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
This is going to be a very long series, so I’d like to provide a tree-top view of how the argument will unfold.
We begin by using three principles from Newtonian physics — the Law of Conservation of Angular Momentum, Newton’s Second Law, and Newton’s Law of Gravitation — to show that the orbit of a planet, under Newtonian physics, satisfies the initial-value problem
,
,
.
In these equations:
The orbit of the planet is in polar coordinates , where the Sun is placed at the origin.
The planet’s perihelion — closest distance from the Sun — is a distance of at angle .
The function is equal to .
is the gravitational constant of the universe.
is the mass of the Sun.
is the mass of the planet.
is the angular momentum of the planet.
The solution of this differential equation is
,
so that
.
In polar coordinates, this is the graph of an ellipse. Substituting , we see that
.
In the solution for , we have and . The number is the eccentricity of the ellipse, while is proportional to the size of the ellipse.
Under general relativity, the governing initial-value problem changes to
,
,
,
where is the speed of light. We will see that the solution of this new differential equation can be well approximated by
.
This last equation describes a spiral that precesses by approximately
radians per orbit
or
radians per orbit,
where is the length of the semimajor axis of the orbit.
This matches the amount of precession in Mercury’s orbit that is not explained by Newtonian physics, thus confirming Einstein’s theory of general relativity.
To the extent possible, I will take the perspective of a good student who has taken Precalculus and Calculus I. However, I will have to break this perspective a couple of times when I discuss principles from physics and derive the solutions of the above differential equations.























 ,
, and the acceleration
and the acceleration  are vectors. When written in polar coordinates, this becomes
are vectors. When written in polar coordinates, this becomes![{\bf F} = m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + m \left(r \frac{d^2 \theta}{d t^2} + 2 \frac{dr}{dt} \frac{d\theta}{dt} \right) {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%7B%5Cbf+F%7D+%3D+m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+m+%5Cleft%28r+%5Cfrac%7Bd%5E2+%5Ctheta%7D%7Bd+t%5E2%7D+%2B+2+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) ,
, is a unit vector pointing away from the origin and
is a unit vector pointing away from the origin and  is a unit vector perpendicular to
is a unit vector perpendicular to  .
. ,
, is the mass of the sun,
is the mass of the sun,  is the mass of the planet, and
is the mass of the planet, and  is the gravitational constant of the universe (which is a constant, no matter what
is the gravitational constant of the universe (which is a constant, no matter what ![m \displaystyle \left[ \frac{d^2r}{dt^2} - r \left( \frac{d\theta}{dt} \right)^2 \right] = \displaystyle -\frac{GMm}{r^2}](https://s0.wp.com/latex.php?latex=m+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-+r+%5Cleft%28+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%3D+%5Cdisplaystyle+-%5Cfrac%7BGMm%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002) ,
, .
. ,
, is a constant, and
is a constant, and .
.


![\displaystyle \frac{\ell^2}{m^2 r^2} \left[ \frac{d^2}{d\theta^2} \left( \frac{1}{r} \right) + \frac{1}{r} \right] = \displaystyle \frac{GM}{r^2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2+r%5E2%7D+%5Cleft%5B+%5Cfrac%7Bd%5E2%7D%7Bd%5Ctheta%5E2%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%2B+%5Cfrac%7B1%7D%7Br%7D+%5Cright%5D++%3D+%5Cdisplaystyle+%5Cfrac%7BGM%7D%7Br%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. , we finally obtain the governing equation
, we finally obtain the governing equation .
. as the constant on the right-hand side instead of just
as the constant on the right-hand side instead of just  ,
, are vectors. In usual rectangular coordinates, the acceleration vector would be expressed as
are vectors. In usual rectangular coordinates, the acceleration vector would be expressed as ,
, and
and  directors are
directors are  and
and  , and the unit vectors
, and the unit vectors  and
and  are perpendicular, pointing in the positive
are perpendicular, pointing in the positive  and positive
and positive  directions.
directions. . This may be rewritten as
. This may be rewritten as ,
,
 .
.
 .
. .
. .
. , or a distance
, or a distance 

 .
.


![= \displaystyle \left[ \frac{d^2r}{dt^2} - r \left(\frac{d\theta}{dt} \right)^2 \right] {\bf u}_r + \left[ 2\frac{dr}{dt} \frac{d\theta}{dt} + r \frac{d^2\theta}{dt^2} \right] {\bf u}_\theta](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cleft%5B+%5Cfrac%7Bd%5E2r%7D%7Bdt%5E2%7D+-++r+%5Cleft%28%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%5Cright%29%5E2+%5Cright%5D+%7B%5Cbf+u%7D_r+%2B+%5Cleft%5B+2%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cfrac%7Bd%5Ctheta%7D%7Bdt%7D+%2B+r+%5Cfrac%7Bd%5E2%5Ctheta%7D%7Bdt%5E2%7D+%5Cright%5D+%7B%5Cbf+u%7D_%5Ctheta&bg=ffffff&fg=000000&s=0&c=20201002) .
. ,
, ;
; in a form that depends only on
in a form that depends only on 


 .
. .
.


![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ \frac{dr}{dt} \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bdr%7D%7Bdt%7D+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle \frac{\ell}{mr^2} \frac{d}{d\theta} \left[ - \frac{\ell}{m} \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+%5Cfrac%7B%5Cell%7D%7Bmr%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+-+%5Cfrac%7B%5Cell%7D%7Bm%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![= \displaystyle - \frac{\ell^2}{m^2r^2} \frac{d}{d\theta} \left[ \frac{d}{d\theta} \left( \frac{1}{r} \right) \right]](https://s0.wp.com/latex.php?latex=%3D+%5Cdisplaystyle+-+%5Cfrac%7B%5Cell%5E2%7D%7Bm%5E2r%5E2%7D+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%5B+%5Cfrac%7Bd%7D%7Bd%5Ctheta%7D+%5Cleft%28+%5Cfrac%7B1%7D%7Br%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. .
. , or
, or .
. .
. .
. .
. . Then
. Then






 into a calculator, then entering
into a calculator, then entering  , and then repeatedly hitting the
, and then repeatedly hitting the  button.
button. .
. .
. . Unfortunately, if we start with a guess near this root, like
. Unfortunately, if we start with a guess near this root, like  , the sequence unexpectedly diverges from
, the sequence unexpectedly diverges from  but eventually converges to the positive root
but eventually converges to the positive root  :
:
















 . Furthermore, if
. Furthermore, if  , then this represents an ellipse with eccentricity
, then this represents an ellipse with eccentricity  whose major axis lies on the
whose major axis lies on the  . Under this assumption,
. Under this assumption,  and
and  , so let me rewrite the previous equation in terms of
, so let me rewrite the previous equation in terms of  :
:
 ,
,
 from the center to the foci satisfies
from the center to the foci satisfies ,
,


 , this means that the origin is, once again, one of the foci of the hyperbola.
, this means that the origin is, once again, one of the foci of the hyperbola. of the hyperbola is easily computed as
of the hyperbola is easily computed as ,
,

 . With this substitution, the equation in rectangular coordinates simplifies to
. With this substitution, the equation in rectangular coordinates simplifies to .
. , so that
, so that  . Then the equation in rectangular coordinates simplifies to
. Then the equation in rectangular coordinates simplifies to 


 .
. ,
, to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line
to the left of the vertex. In other words, the origin is the focus of the parabola. (For what it’s worth, the directrix of the parabola would be the vertical line  , located
, located  to the right of the vertex.)
to the right of the vertex.)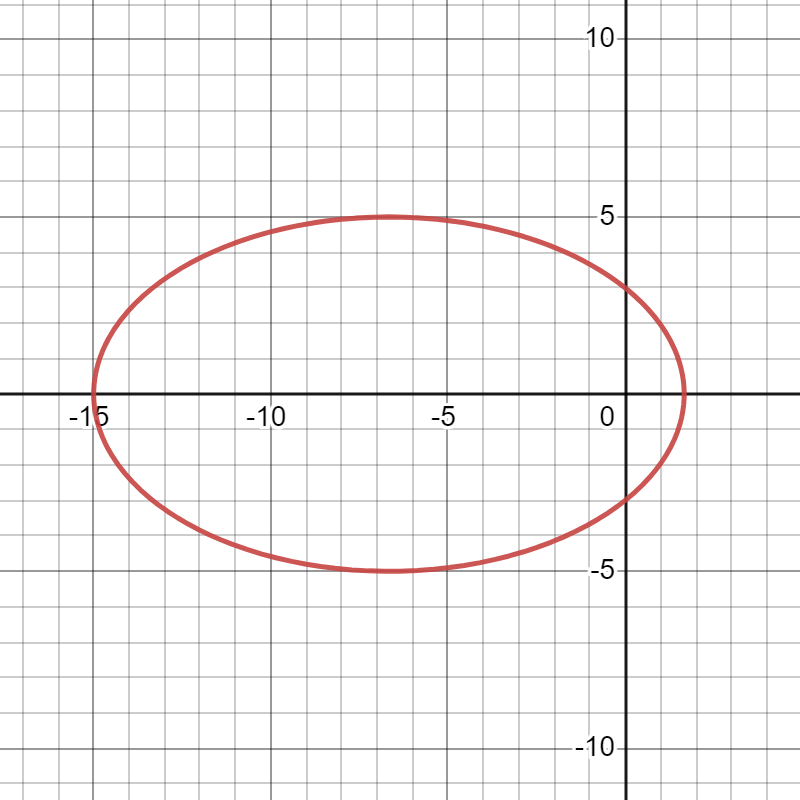
 .
.








 so that
so that .
. ,
, ,
, ,
, .
. ,
,



 . Therefore, since the foci of the ellipse are distance
. Therefore, since the foci of the ellipse are distance  , or
, or  . That is, the origin is one focus of the ellipse. (For the little it’s worth, the other focus is located at
. That is, the origin is one focus of the ellipse. (For the little it’s worth, the other focus is located at  .
. .
. . For this ellipse, the planet’s closest approach to the Sun occurs at
. For this ellipse, the planet’s closest approach to the Sun occurs at  ,
, :
: .
. of the major axis of the ellipse is the sum of these two distances:
of the major axis of the ellipse is the sum of these two distances:

 .
. , we can also compute
, we can also compute 






 using
using  . The reason for choosing the letter
. The reason for choosing the letter  and
and  and altering the value of
and altering the value of 
 and
and  , so the distance from the origin is the same for all angles. However, as
, so the distance from the origin is the same for all angles. However, as 
 and
and  . In particular, the denominator is always positive. Therefore, the value of
. In particular, the denominator is always positive. Therefore, the value of  . So, for example, when
. So, for example, when  is as close as the graph gets to the origin. Let’s call this closest distance
is as close as the graph gets to the origin. Let’s call this closest distance  .
. , the graph switches from an ellipse to a parabola, where the origin is the focus of the parabola. For
, the graph switches from an ellipse to a parabola, where the origin is the focus of the parabola. For  , the graph becomes a hyperbola. However, since we’re mostly going to be concerned with stable planetary orbits in this series, we won’t dwell too much on the case
, the graph becomes a hyperbola. However, since we’re mostly going to be concerned with stable planetary orbits in this series, we won’t dwell too much on the case  .
. , and then alter the value of
, and then alter the value of 
 . If I had changed the upper bound to something larger than
. If I had changed the upper bound to something larger than  , the spiral would continue.
, the spiral would continue. is a multiple of
is a multiple of  , or
, or  . If
. If  , then the angle of closest approach to the origin would
, then the angle of closest approach to the origin would  , and the graph simply cycles over itself. However, if
, and the graph simply cycles over itself. However, if  , then this angle
, then this angle  .
. . Therefore, the amount of precession would be
. Therefore, the amount of precession would be  radians
radians  . Therefore, after 19 “leafs” of the spiral, the graph would begin to cycle on top of itself.
. Therefore, after 19 “leafs” of the spiral, the graph would begin to cycle on top of itself. ,
, is equal to
is equal to  .
. .
. .
. . The number
. The number  is the eccentricity of the ellipse, while
is the eccentricity of the ellipse, while  is proportional to the size of the ellipse.
is proportional to the size of the ellipse.![u''(\theta) + u(\theta) = \displaystyle \frac{GMm^2}{\ell^2} + \frac{3GM}{c^2} [u(\theta)]^2](https://s0.wp.com/latex.php?latex=u%27%27%28%5Ctheta%29+%2B+u%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cfrac%7BGMm%5E2%7D%7B%5Cell%5E2%7D+%2B+%5Cfrac%7B3GM%7D%7Bc%5E2%7D+%5Bu%28%5Ctheta%29%5D%5E2&bg=ffffff&fg=000000&s=0&c=20201002) ,
,
![\approx \displaystyle \frac{1}{\alpha} \left[1 + \epsilon \cos \left(\theta - \frac{\delta \theta}{\alpha} \right) \right]](https://s0.wp.com/latex.php?latex=%5Capprox+%5Cdisplaystyle+%5Cfrac%7B1%7D%7B%5Calpha%7D+%5Cleft%5B1+%2B+%5Cepsilon+%5Ccos+%5Cleft%28%5Ctheta+-+%5Cfrac%7B%5Cdelta+%5Ctheta%7D%7B%5Calpha%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=000000&s=0&c=20201002) .
. radians per orbit
radians per orbit radians per orbit,
radians per orbit,