Numerical integration is a standard topic in first-semester calculus. From time to time, I have received questions from students on various aspects of this topic, including:
Why is numerical integration necessary in the first place?
Where do these formulas come from (especially Simpson’s Rule)?
How can I do all of these formulas quickly?
Is there a reason why the Midpoint Rule is better than the Trapezoid Rule?
Is there a reason why both the Midpoint Rule and the Trapezoid Rule converge quadratically?
Is there a reason why Simpson’s Rule converges like the fourth power of the number of subintervals?
In this series, I hope to answer these questions. While these are standard questions in a introductory college course in numerical analysis, and full and rigorous proofs can be found on Wikipedia and Mathworld, I will approach these questions from the point of view of a bright student who is currently enrolled in calculus and hasn’t yet taken real analysis or numerical analysis.
In the previous post in this series, we found that the local error of the right endpoint approximation to was equal to
.
We now consider the global error when integrating over the interval and not just a particular subinterval.
The total error when approximating will be the sum of the errors for the integrals over , , through . Therefore, the total error will be
.
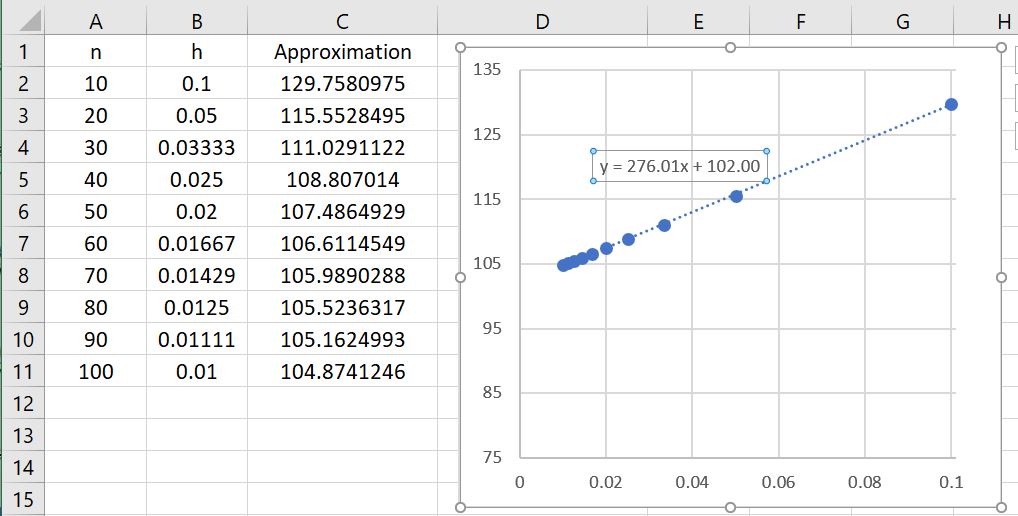
So that this formula doesn’t appear completely mystical, this actually matches the numerical observations that we made earlier. The figure below shows the left-endpoint approximations to for different numbers of subintervals. If we take and , then the error should be approximately equal to
,
which, as expected, is close to the actual error of .
We now perform a more detailed analysis of the global error, which is almost a perfect copy-and-paste from the previous analysis. Let , so that the error becomes
,
where is the average of the . Clearly, this average is somewhere between the smallest and the largest of the . Since is a continuous function, that means that there must be some value of between and — and therefore between and — so that by the Intermediate Value Theorem. We conclude that the error can be written as
,
Finally, since is the length of one subinterval, we see that is the total length of the interval . Therefore,
,
where the constant is determined by , , and . In other words, for the special case , we have established that the error from the left-endpoint rule is approximately linear in — without resorting to the generalized mean-value theorem.
I'm a Professor of Mathematics and a University Distinguished Teaching Professor at the University of North Texas. For eight years, I was co-director of Teach North Texas, UNT's program for preparing secondary teachers of mathematics and science.
View all posts by John Quintanilla
Published
One thought on “Thoughts on Numerical Integration (Part 15): Right endpoint rule and global rate of convergence”

 was equal to
was equal to

![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=000000&s=0&c=20201002) and not just a particular subinterval.
and not just a particular subinterval. will be the sum of the errors for the integrals over
will be the sum of the errors for the integrals over ![[x_0,x_1]](https://s0.wp.com/latex.php?latex=%5Bx_0%2Cx_1%5D&bg=ffffff&fg=000000&s=0&c=20201002) ,
, ![[x_1,x_2]](https://s0.wp.com/latex.php?latex=%5Bx_1%2Cx_2%5D&bg=ffffff&fg=000000&s=0&c=20201002) , through
, through ![[x_{n-1},x_n]](https://s0.wp.com/latex.php?latex=%5Bx_%7Bn-1%7D%2Cx_n%5D&bg=ffffff&fg=000000&s=0&c=20201002) . Therefore, the total error will be
. Therefore, the total error will be

 for different numbers of subintervals. If we take
for different numbers of subintervals. If we take  and
and  , then the error should be approximately equal to
, then the error should be approximately equal to

 .
.
 , so that the error becomes
, so that the error becomes

 is the average of the
is the average of the  . Clearly, this average is somewhere between the smallest and the largest of the
. Clearly, this average is somewhere between the smallest and the largest of the  is a continuous function, that means that there must be some value of
is a continuous function, that means that there must be some value of  between
between  and
and  — and therefore between
— and therefore between  and
and  — so that
— so that  by the Intermediate Value Theorem. We conclude that the error can be written as
by the Intermediate Value Theorem. We conclude that the error can be written as

 is the length of one subinterval, we see that
is the length of one subinterval, we see that  is the total length of the interval
is the total length of the interval 
 is determined by
is determined by  . In other words, for the special case
. In other words, for the special case  , we have established that the error from the left-endpoint rule is approximately linear in
, we have established that the error from the left-endpoint rule is approximately linear in 
One thought on “Thoughts on Numerical Integration (Part 15): Right endpoint rule and global rate of convergence”