In this series, I’m discussing how ideas from calculus and precalculus (with a touch of differential equations) can predict the precession in Mercury’s orbit and thus confirm Einstein’s theory of general relativity. The origins of this series came from a class project that I assigned to my Differential Equations students maybe 20 years ago.
We previously showed that if the motion of a planet around the Sun is expressed in polar coordinates 

where 





We will also impose the initial condition that the planet is at perihelion (i.e., is closest to the sun), at a distance of 




the second equation arises since
In previous posts, we showed that the solution of this initial-value problem is
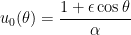
where 

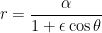
so that, as shown earlier in this series, the orbit is an ellipse with eccentricity 

At long last, we’re now ready to see what happens under general relativity. According to the theory of general relativity, the governing differential equation for the orbit of a planet should be changed ever so slightly to
![u''(\theta) + u(\theta) = \displaystyle \frac{Gm^2 M}{\ell^2} + \frac{3GM}{c^2} [u(\theta)]^2](https://s0.wp.com/latex.php?latex=u%27%27%28%5Ctheta%29+%2B+u%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cfrac%7BGm%5E2+M%7D%7B%5Cell%5E2%7D+%2B+%5Cfrac%7B3GM%7D%7Bc%5E2%7D+%5Bu%28%5Ctheta%29%5D%5E2&bg=ffffff&fg=000000&s=0&c=20201002)
where a second term was added to the right-hand side. (I will make no attempt here to justify the physics for this second term.) In this second term, 

![u''(\theta) + u(\theta) = \displaystyle \frac{1}{\alpha} + \delta [u(\theta)]^2](https://s0.wp.com/latex.php?latex=u%27%27%28%5Ctheta%29+%2B+u%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cfrac%7B1%7D%7B%5Calpha%7D+%2B+%5Cdelta+%5Bu%28%5Ctheta%29%5D%5E2&bg=ffffff&fg=000000&s=0&c=20201002)
Finding an exact solution of this new differential equation is hopeless. While the previous differential equation was linear with constant coefficients, this new differential is decidedly nonlinear because of the new term ![[u(\theta)]^2](https://s0.wp.com/latex.php?latex=%5Bu%28%5Ctheta%29%5D%5E2&bg=ffffff&fg=000000&s=0&c=20201002)
So, instead of attempting to find an exact solution, we will use the method of successive approximations, mentioned earlier in this series, to find an approximate solution that is very, very close to the exact solution. Since 
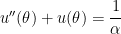
will be approximately equal to the solution of the “real” differential equation under general relativity. We have already shown that the solution of this simpler differential equation is
Therefore, the method of successive approximations suggests that a better approximation to the true orbit will be the solution of
![u''(\theta) + u(\theta) = \displaystyle \frac{1}{\alpha} + \delta [u_0(\theta)]^2](https://s0.wp.com/latex.php?latex=u%27%27%28%5Ctheta%29+%2B+u%28%5Ctheta%29+%3D+%5Cdisplaystyle+%5Cfrac%7B1%7D%7B%5Calpha%7D+%2B+%5Cdelta+%5Bu_0%28%5Ctheta%29%5D%5E2&bg=ffffff&fg=000000&s=0&c=20201002)
or

While significantly messier than the differential equation under Newtonian mechanics, this is now a linear differential equation that can be solved using standard techniques from differential equations. In the next few posts, we will solve this new differential equation, thus finding the predicted orbit of a planet under general relativity.

One thought on “Confirming Einstein’s Theory of General Relativity With Calculus, Part 6a: New Differential Equation”